基于机载Li DAR技术的植被密集区域DEM生成方法研究
2023-09-13 12:04:34乔亚奇姬家泽
黑龙江科学 2023年16期
曹 兵,乔亚奇,姬家泽
(天津华北地质勘查局核工业二四七大队,天津 301800)
0 引言
DEM(数字高程模型)为主要反映地形起伏变化的数字化模型,能为地理信息系统(GIS)、土地利用规划、水文学、生态环境监测等领域的研究提供有力支持。传统的DEM测绘方法包括倾斜摄影测量法、GPS-RTK测量法、遥感影像法等,但都存在植被遮挡及重叠问题,在植被密集区域应用中受到限制。近年来,激光雷达(LiDAR)技术迅速发展,其在地形测量、三维建模、环境检测等方面得到了广泛应用。在植被密集区域的DEM测绘中,机载LiDAR具有高能量、狭窄光束角度、多次反射及高分辨率测量等特点,能够穿透植被到达地面,获取植被层及地面的点云数据,有效解决植被遮挡及重叠问题,对于精度要求较高的植被高程信息提取具有明显优势[1]。机载LiDAR是一种使用激光技术进行远距离测量的遥感工具,通过发射脉冲光束并测量其返回时间来获取地面或物体的三维坐标。机载LiDAR系统通过内置的激光器发射短脉冲激光束,与地面或物体发生相互作用,一部分激光束在与地面或物体相互作用后以反射形式返回。其使用高精度的计时器来测量从激光器发射脉冲到接收到反射信号的时间间隔,计算出光的旅程距离。结合机载LiDAR系统的位置及姿态信息,可以计算地面或物体精确的三维坐标。机载LiDAR测量原理如图1所示[2]:

图1 机载LiDAR测量原理
由该系统获取的数据称为三维点云,包含地物对象的高程信息,具有丰富的目标多次回波信号与强度信息、地物类别信息及与每一点高程信息对应的位置信息等。
1 DEM生成方法
1.1 整体技术路线设计
针对植被密集区域开展无人机搭载激光雷达模块进行航测,采集到目标区域的激光雷达点云数据通过坐标转换、滤波、分类等处理,得到目标区域的地面点云,评估通过激光雷达数据处理得到的高程数据精度。精度符合要求时建立测区数字高程模型,整体技术路线如图2所示[3]。

图2 整体技术路线设计
1.2 外业LiDAR点云数据采集
采用飞马D2000无人机作为无人机平台,搭载D-LIDAR2000激光雷达模块。主要技术参数如表1所示[4]。

表1 D-LIDAR2000激光雷达的主要参数
外业航飞数据采集中,对测区范围内进行航空雷达数据采集,获取雷达数据、POS数据等各类航测的原始数据。按照航带设计参数飞行,按照设计参数采集数据(雷达、导航),如果数据存在漏洞及质量问题,组织进行补摄或重摄。为提升补摄单条航线的稳定性及质量,补摄或重摄时需将重叠度不足或漏片的航线上下各延长一条航线。外业数据采集完成后进行数据检查,包括航带覆盖、数据遗漏、地面数据检查等,进行数据备份。
1.3 点云数据预处理
外业LiDAR点云数据采集完成后需进行数据预处理,应用飞马智激光软件,在新建项目中输入工程名称、工程路径、激光系统,点击云解算,选择合适的视场角度,点击开始按钮,开始点云解算,进行特征提取,按照默认参数点击开始,再点击航带平差,点击计算删除较大且无连续性偏差值的点。进行坐标转换及测区坐标转换参数配置,对完成坐标系统转换点云的精度进行检查。导出数据,设置输出路径[5]。
1.4 点云分类
点云分类分为点云自动分类及点云手动分类两种。自动分类是应用算法及模型对点云数据进行分类及分割,以识别不同的物体或场景。手动分类是以人工干预的方式对点云数据进行分类,在自动分类基础上进行精确分类。进行自动分类前,将明显低于地面的点、高于地表目标的点及运动地物点作为噪声点剔除[1,6]。
1.4.1 自动分类
自动分类应用飞马智激光软件,打开无人机管家中的智点云模块,添加激光原始数据(标准格式点云),完成新建项目,在完成点云数据去噪后对点云进行自动分类。依据植被密集区域地物特征进行地面点、植被点及建筑物点分类,如地面点提取,需设置如高度阈值、坡度阈值等;建筑物提取需设置建筑物的高度阈值、体积阈值等;植被分类需设置NDVI阈值、高度阈值等;目标检测需设置车辆的高度、体积阈值等。本项目地面点自动分类前后效果对比如图3所示。

图3 地面点分类前后效果
植被点云分类的参数设置可根据一般植被默认参数设置,低植被0.5~1 m、中植被1~3 m、高植被3 m以上。
建筑物点分类的参数设置可默认设置,自动分类算法主要通过分析点云数据的形状、几何特征、拓扑结构等信息集成相关算法,对建筑物点云数据进行分类。
1.4.2 人工分类
点云人工交互编辑分类使用TerraSolid软件,经过人工判断地形、地物,将粗处理时归错层的点进行人工归层。
植被点云人工分类。植被密集覆盖区域(如点云判断,平均树高大于10 m;影像辅助判断,树木连续覆盖面积大于100 m2)较少激光点穿透到地面,分类发现与其他区域地面点高程相近的激光点归入地面层,否则归入非地面点层。若无较低激光点,点云剖面比较平滑,此时需与其他区域比较,用影像辅助进行正确判断。进行拉剖面重新归类,高层较低的贴近地表的为地面点,呈团状的为非地面点(植被点云)。
建筑物点云人工分类。结合粗略正射影像,一些建筑物顶面的点云没有或部分归入非地面点层时,需通过剖面将建筑物顶面的点云归入非地面点层,建筑物顶面以上的附属设施归为非地面点层。错归为Ground层的建筑物表面点、地面上的杂物点,需归入非地面点层,如建筑物墙角或墙面点、围墙上的点(含墙面)、露天设备、煤堆上的点(被吸收、比较少)及草堆、箱子、垃圾等临时性堆积物上的点,如图5所示,靠近地表位置的为地面点,呈规则形态的为非地面点(建筑点云)。
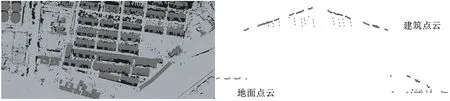
图5 建筑物模型及点云剖面效果
2 DEM成果输出
点云自动及人工分类完成后需进行数据检核,选择检核点路径,设置数据起始行与X/Y/Z列数,导入检核点检核,如果精度满足规范要求则点击“成果输出-DEM”,设置输出DEM的类型、分辨率,选择构建DEM的点云类别,利用地面点构建并输出DEM,输出的DEM格式为.TIF。输出的DEM成果如图6所示。

图6 测区DEM成果
研究结果可促进机载LiDAR技术的智能化及高效化发展,更好地服务于地质地形研究。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
河北地质(2022年2期)2022-08-22 06:24:04
汽车观察(2021年8期)2021-09-01 10:12:41
当代陕西(2020年23期)2021-01-07 09:24:44
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
现代园艺(2017年23期)2018-01-18 06:58:12
石家庄铁路职业技术学院学报(2017年4期)2017-05-25 13:26:41
应用海洋学学报(2015年2期)2015-11-22 07:36:28
全球定位系统(2015年4期)2015-02-28 12:38:13