永磁同步电机电流的无差拍自抗扰控制
2023-01-08 14:09:40张本翔左月飞朱孝勇
软件导刊 2022年10期
张本翔,左月飞,全 力,朱孝勇
(江苏大学电气信息工程学院,江苏镇江 212013)
0 引言
永磁同步电机以其高功率、高密度和高效率等特点被广泛应用于工业伺服系统中,例如机器人机械臂、数控机床、纺织机械、煤矿生产等领域。永磁伺服系统通常由位置环、转速环和电流环组成,其中作为内环的电流环对整个伺服系统的性能起着决定性作用。
电流环一般采用PI 控制[1],但控制系统存在的延时限制了其动态性能的提升[2],而且由于积分器可能造成积分饱和[3],导致超调过大、整定时间增加,无法满足快速运动场合的需求。为进一步提高电机的动态响应能力,有学者提出了模型预测控制[4]和无差拍预测控制[5]。模型预测是利用代价函数计算7 种电压矢量后得到最优解[6],但开关频率不固定[7],电流存在抖动。相比于模型预测控制,无差拍控制利用空间矢量脉宽调制技术[8],开关频率固定,可获得更平滑、准确的电流波形,但采用无差拍预测控制的前提是模型参数必须精确。由于在电机运行过程中,温度变化和磁饱和有可能导致电机参数发生变化,该方法便不再适用[9],因此提高系统参数的鲁棒性至关重要。
文献[10]在无差拍控制中引入自适应增量算法,减少了电机参数失配带来的不利影响,但是受电感的影响,电流存在较大脉动;文献[11]提出一种鲁棒因子并将其加入无差拍控制中,能够在电感变化时提高系统的稳定裕度,但是该方法是以牺牲系统的动态性能为代价的;文献[12]将参数辨识与无差拍相结合,对电机的电感和电阻进行辨识,有效提升了系统的动态性能和参数鲁棒性,不过并未考虑对磁链的辨识。文献[13]指出,在无差拍预测控制中,电机的磁链失配会导致电流跟踪存在稳态误差。为此,文献[14]分析了电机参数不匹配对传统无差拍预测控制的影响,并将滑模控制与无差拍预测控制相结合,设计了滑模观测器估计扰动,使参数具有较好的鲁棒性,然而滑模控制下的电流存在抖振现象。为降低系统抖振水平,文献[15]基于无差拍控制设计了快速功率滑模趋近律,文献[16]在滑模中采用二阶趋近律,均有效降低了抖振,但在控制器的参数整定上较为繁琐。相比于滑模观测器,自抗扰控制中的扩张状态观测器也可对参数变化引起的扰动进行观测,而且不存在滑模控制固有的抖振问题[17]。文献[18]将无差拍控制与扩张状态观测器相结合用于异步电机中,取得了较好的控制效果。文献[19]、[20]在无差拍控制中引入无模型算法,但该方法将已知量看作扰动,容易使观测误差过大,导致系统的控制性能降低。
本文借鉴自抗扰控制思想,首先针对无差拍电流控制易受电机参数变化而产生扰动的问题,提出利用扩张状态观测器估计参数扰动并实时进行补偿,同时针对延时问题,利用扩张状态观测器对电流和扰动进行预测,实现了无差拍电流预测控制。其次,本文从理论上分析了噪声对观测器带宽的影响,平衡了带宽与噪声之间的关系,实现了快速的电流跟踪响应,增强了系统鲁棒性且参数整定方便。最后的实验结果证实了本文方法的有效性。
1 电流自抗扰控制器设计
1.1 PMSM数学模型
永磁同步电机在转子磁场定向的同步旋转坐标系(dq坐标系)下的电压方程为:
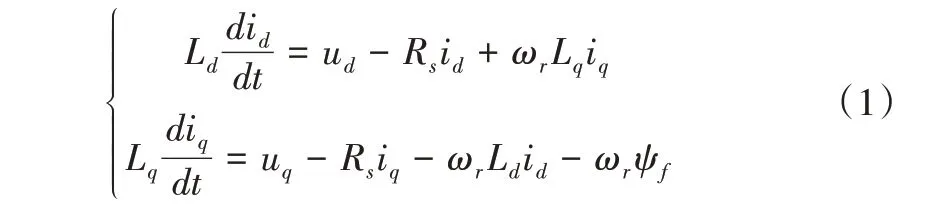
式中,id和iq、ud和uq、Ld和Lq分别为d-q坐标系下的电流(A)、电压(V)、电感(H),Rs为定子电阻(Ω),ωr为转子电角速度(rad/s),ψf为永磁磁链的幅值(Wb)。
将电流状态方程表示为复矢量fdq=fd+jfq的形式:
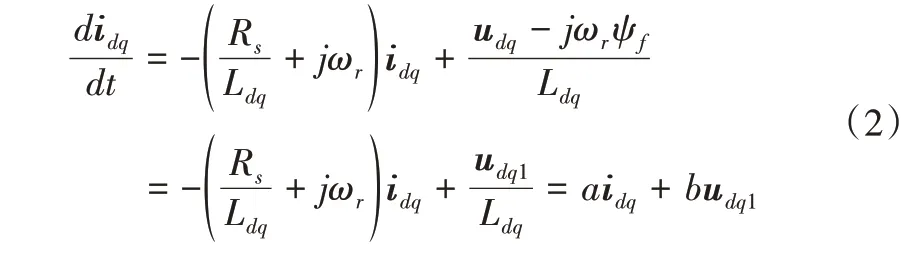
式中,udq1=udq-jωrψf为电压,a=-(Rs/Ldq+jωr)为状态系数,b=1/Ldq为电流控制增益。
在实际的电机控制系统中,与电机参数相关的a、b可能是未知或时变的,通常采用其估计值来代替。当估计值与实际值存在偏差时,系统中就会产生扰动电压。另外,由于逆变器的死区时间和功率器件的压降会导致期望电压与实际电压不相等,也会产生相应的扰动电压。因此,需要将电流状态方程修改为:

式中,为期望的电压,也即电压给定值,d为参数不确定性和电压误差等因素导致的扰动。
1.2 反馈控制律设计

式中,kp为反馈控制增益。
将式(3)代入式(4),并忽略电流给定的微分项可得到:

式(5)中的电流idq通常由霍尔电流传感器测量得到,因此测量值中会存在测量噪声。假设测量值与测量噪声分别为另外,扰动d为未知量,难以直接通过测量获得。为减小噪声并实现扰动补偿,通常采用观测器对电流和扰动同时进行估计,并用其估计值代替实际值。不妨假设电流与扰动的估计值分别为则电压给定值为:

考虑到实际系统中PWM 占空比最大为1,常采用饱和函数对电压进行限幅:
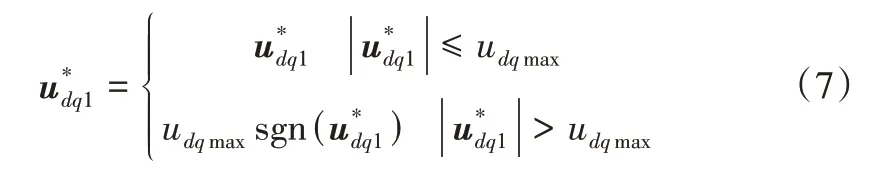
式中,udqmax为电压的限幅值。
在自抗扰控制系统中,通常采用扩张状态观测器(Extended State Observer,ESO)同时观测状态和扰动,以下对ESO 进行设计与分析。
1.3 电流与扰动估计
对式(3)表示的系统构建ESO 状态方程为:

由式(8)可得电流观测误差、电流估计值和扰动估计值分别为:
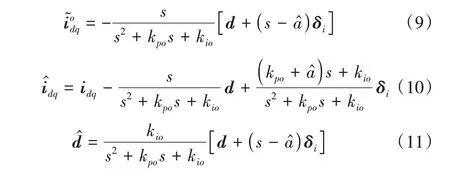
由式(10)可看出,系统没有扰动时,ESO 能够实现对真实电流的完全跟踪,且能够抑制测量噪声。由式(11)可看出,在不考虑测量噪声的情况下,估计的扰动是对实际扰动的二阶低通滤波。设定ESO 系统的特征方程为s2+,其中ωn为无阻尼自然频率,则kpo=2ωn,kio=越大,ESO 对扰动的估计越快,扰动补偿后系统的抗扰性能越强,但系统的噪声也会越大,将导致系统的控制性能下降。因此,实际系统中应根据具体情况对ωn进行调节。
1.4 自抗扰控制系统性能分析
根据式(6)、式(8)可绘制出电流自抗扰控制系统的结构框图,如图1所示。
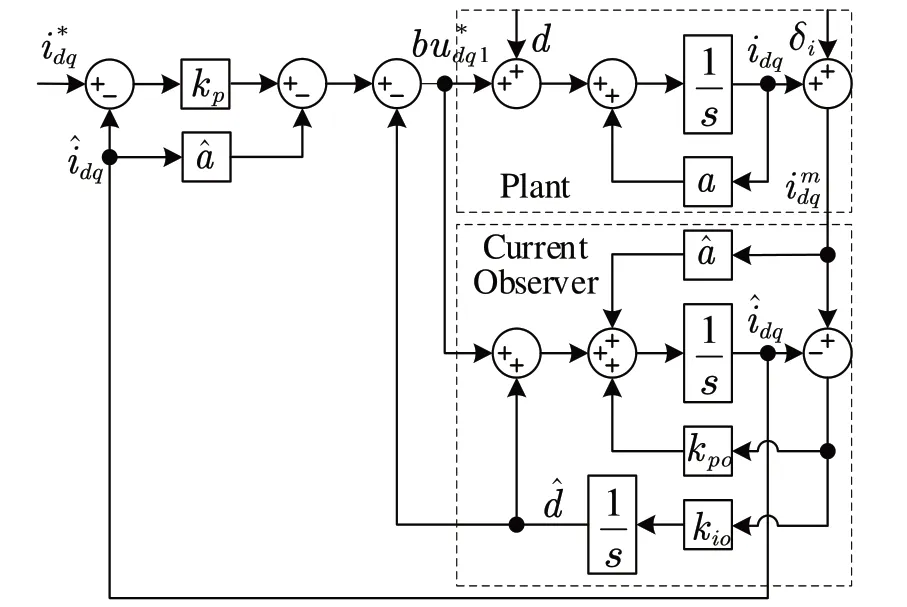
Fig.1 Block diagram of the ADRC current control system图1 电流自抗扰控制系统结构框图
给定电流、扰动和噪声到输出电流的传递函数分别为:

为更直观地看出调节无阻尼自然频率ωn对扰动和噪声的影响,根据式(13)、式(14)分别绘制了相应的频域特性图,如图2、图3所示(彩图扫OSID 码可见,下同)。
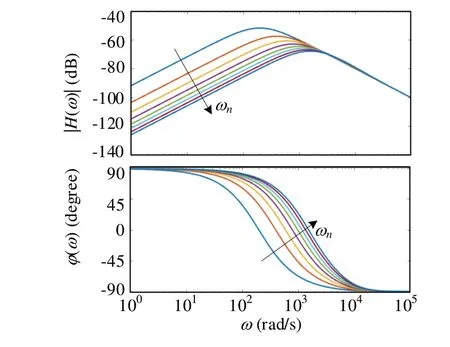
Fig.2 Frequency domain characteristics of disturbance to output current图2 扰动到输出电流的频域特性
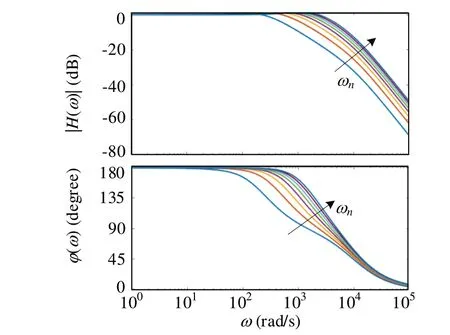
Fig.3 Frequency domain characteristics of measured noise to output current图3 测量噪声到输出电流的频域特性
由图2 可以看出,随着ωn的增大(箭头所指方向),系统抗低频扰动的幅值减小;随着ωn的减小,系统抗低频扰动的幅值增大,因此从抗扰能力方面考虑,ωn应越大越好。由图3 可以看出,随着ωn的增大,系统抑制高频噪声的幅值增大,但随着ωn的减小,在高频部分反而有利于抑制高频噪声幅值,因此从抑制噪声能力方面考虑,系统的ωn应越小越好。然而,由于ωn与系统的抗扰能力有关,在实际中需要平衡好扰动观测与噪声抑制的关系。
由于电流环是内环,电流环的跟踪性能处于更重要的位置,因此应先设定较大的kp以获得较好的跟踪性能,之后再根据噪声情况尽量增大ωn以提高观测器的动态性能,从而增强系统的抗扰性能。在实际系统中,由于kp较大,通常ωn会较小,因此系统对快速变化的扰动抑制性能较弱。为提高系统的控制性能,应尽量提高电机参数的准确性,并减小其它因素造成的扰动。
2 无差拍电流预测自抗扰控制器
2.1 传统无差拍电流控制与分析
为获得更好的电流动态响应能力,本文采用无差拍控制方法。无差拍电流控制是基于离散化的控制方法,考虑到采样时间Ts较小,因此可采用前向欧拉法将式(2)离散化得:
但是式(17)所表示的传统无差拍电流控制方法并未考虑到数字控制系统中的一步延时问题,如图4所示。

Fig.4 One step delay of digital control system图4 数字控制系统的一步延时
在PWM 触发后,施加到电机上的电压并非为本周期的控制量,而是上一周期计算所得,因此会产生一步延时。延时问题会降低系统的动态性能,因此针对这一问题,普遍采用延时补偿进行消除,于是得到:

为推导电机参数变化对传统无差拍电流预测控制造成的影响,以q轴为例,采用电机参数的估计值,由式(18)可得出:
考虑延时补偿,将式(15)转换为:

将式(20)代入式(19),整理得到:
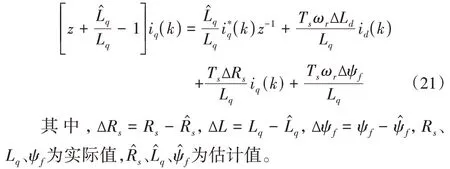
如果采用id=0 的控制方式,不计d轴电流,忽略电阻和磁链的影响,可得:

由式(21)可得出,在电机参数匹配时,反馈电流在稳态时可实现无误差地跟踪;在电感和电阻参数准确时,磁链失配会产生电流跟踪稳态误差。由式(22)的特征方程可知 其特征根为于 是可解得说明在传统无差拍预测控制中,如果估计电感大于2 倍的实际电感,系统则会不稳定,因此需要研究有效的方法对传统无差拍电流预测中的电机参数扰动进行观测与补偿。
2.2 无差拍电流预测控制扰动问题
在数字控制系统中,由于采样时间Ts非常小,通常认为转速ωr在短时间内保持不变,因此系数a可被认为是常数。考虑到电机参数变化导致的扰动,采用前向欧拉法将式(3)离散化得到:

在实际数字系统中,实际电压值为上一个PWM 周期计算得到的给定电压值,即电压存在一步延时,因此式(23)应改为:

为实现无差拍控制,应使idq(k+2)跟踪电流给定值,因此得到电压给定值

式(25)中,电流idq(k+1)和d(k+1)在k采样时刻是未知的,因此需要对其进行预测。假设其预测值分别为,则可将式(25)修改为:

2.3 扰动与电流预测
考虑数字系统一步延迟时,第k+1 采样时刻的电流可根据电流状态方程预测得到:

这一预测方法被广泛应用于有限集模型预测控制中,但此方法是在假设系统不存在扰动的情况下实现的。当系统存在扰动,例如电机参数不匹配导致的扰动时,该方法将不再适用,需要对扰动进行观测。为此,本文采用自抗扰控制系统中已有的ESO 对电流和扰动进行预测。

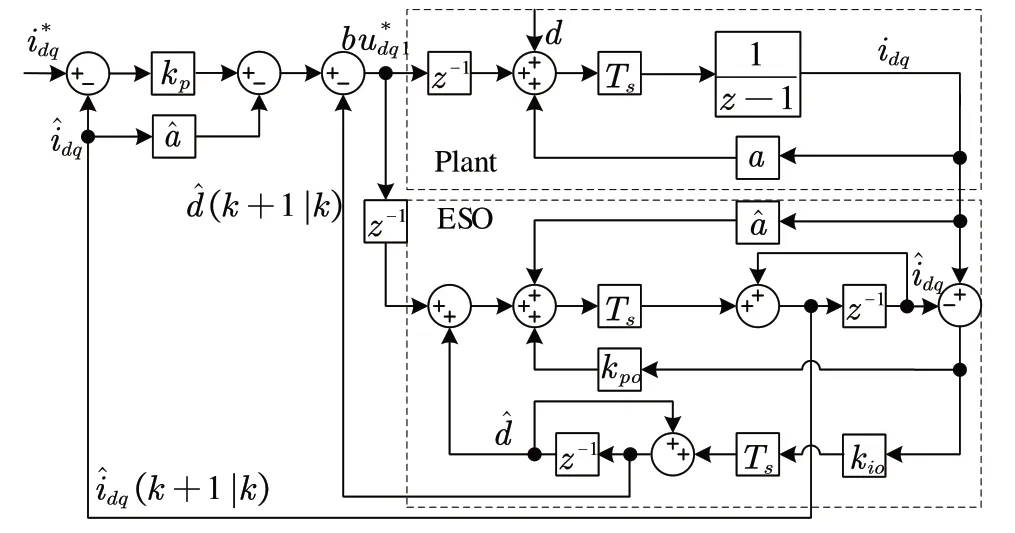
Fig.5 Structure block diagram of deadbeat active disturbance rejection current control system图5 无差拍自抗扰电流控制系统结构框图
综上,无差拍自抗扰控制系统结构框图如图6所示。

Fig.6 Structure block diagram of deadbeat ADRC system图6 无差拍自抗扰控制系统结构框图
3 实验验证与分析
为验证所提控制方法的有效性,本文进行了实验验证。本实验平台永磁同步电机调速系统采用基于dSPACE 的实时仿真系统DS1103,利用快速原型法通过Simulink 自动完成代码生成与下载。实验中的逆变器开关频率为10kHz,控制系统的硬件设备如图7所示。
PMSM 控制系统的电机参数如表1所示。
实验中,速度环采用PI 控制器,电流环分别采用传统预测控制器和无差拍自抗扰预测控制器。根据实验测试结果,选取ADRC 控制器参数为:ωn=1 000。速度环中的PI控制器参数设置为kps=0.01,kis=30。首先在电机参数准确时进行验证,然后改变电机参数进行参数鲁棒性验证。
3.1 无差拍电流预测实验
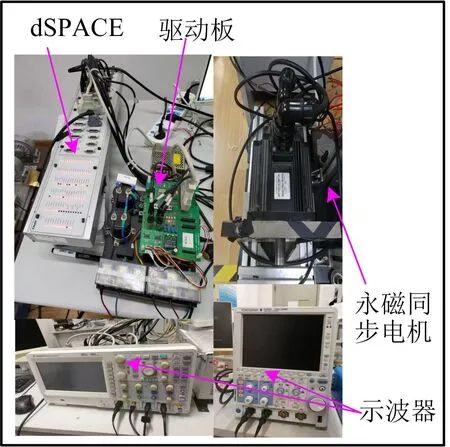
Fig.7 Experimental equipment图7 实验设备
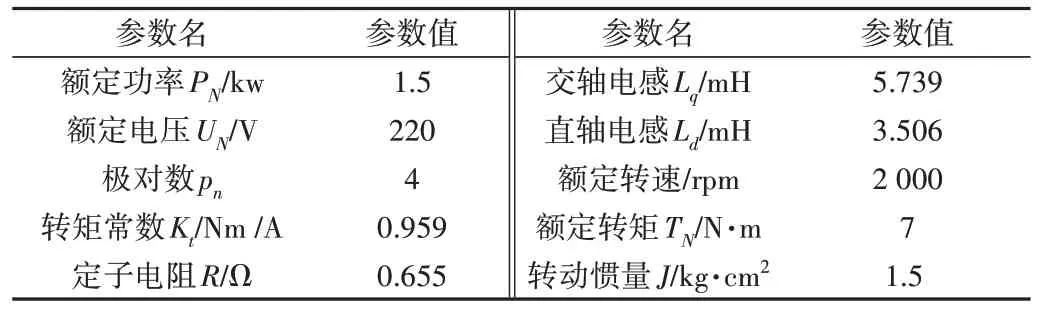
Table 1 Motor parameters表1 电机参数
在电机参数准确时,转速给定由500rpm 阶跃到700rpm,实验波形如图8 所示。iqest表示预测电流,iqfdb表示反馈电流。实验波形上部分为传统无差拍预测实验波形,下部分为无差拍自抗扰预测实验波形。由图可以看出,使用ESO 实现的电流预测与传统预测是一致的,在传统预测基础上增加的ESO 不会影响电流的快速响应性能。相对于反馈电流,预测电流可实现超前一步。
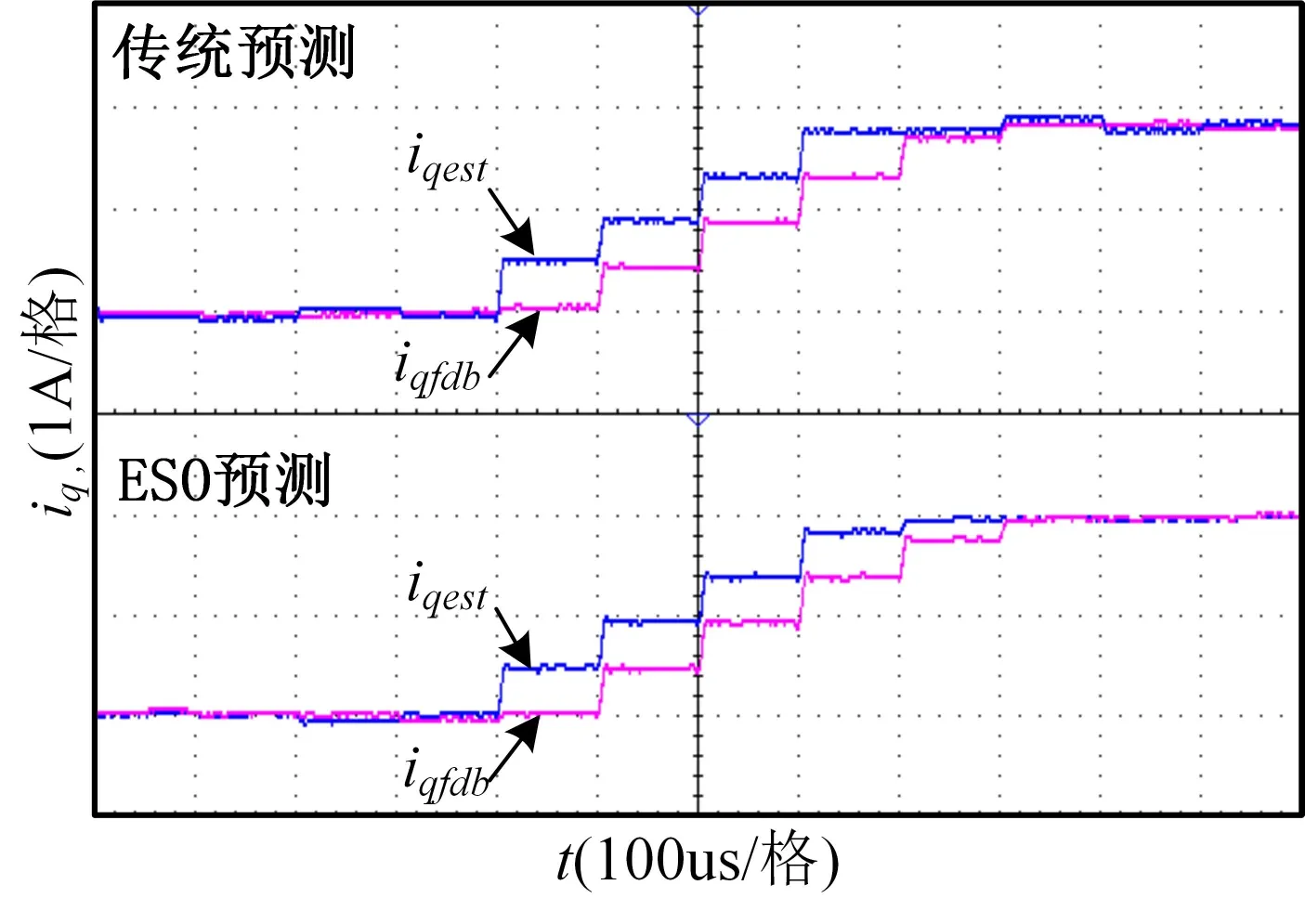
Fig.8 Experimental waveform of deadbeat prediction current control图8 无差拍电流预测实验波形
3.2 系统参数鲁棒性实验
验证系统在电机电感失配下参数的鲁棒性,分别改变电感至原来的2 倍和0.3 倍,实验波形如图9、图10 所示。iqref表示给定电流表示估计电感,Ldq表示实际电感。给定转速由600rpm 阶跃至800rpm,由图可以看出,在传统无差拍预测控制下,电感失配2 倍时电流已经振荡,这与前面的理论分析一致。在电感变小时也会在阶跃响应时引起预测电流较小的振荡,这是因为电感失配较大时施加到电机上的电压存在抖动所致。而使用ESO 进行预测的电流可以实现稳定运行,这是由于ESO 对电感失配造成的扰动进行了实时观测和补偿,控制系统具有较强的鲁棒性。
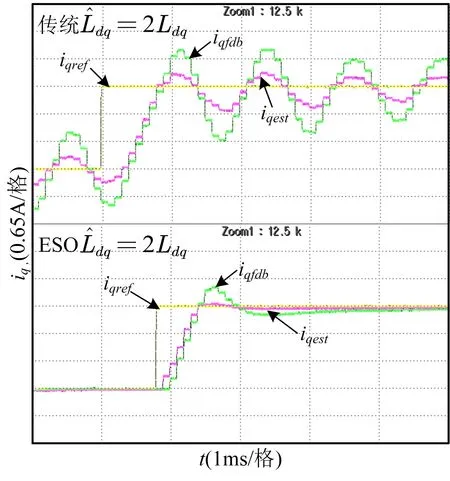
Fig.9 Experimental waveform in case of 2 time of inductance mismatch图9 电感失配2倍下的实验波形

Fig.10 Experimental waveform in case of 0.3 times of inductance mismatch图10 电感失配0.3倍下的实验波形
其次验证系统在磁链失配情况下的参数鲁棒性,电机转速恒定在700rpm,然后分别改变磁链至原来的1.5 倍和0.5 倍。表示估计磁链,ψf表示实际磁链。实验波形如图11 所示。由图可以看出,传统预测实验在磁链失配时会产生电流跟踪稳态误差,这与前面的理论分析相符,而设计的ESO 可以利用对扰动的估计进行补偿,实现无稳态误差的电流跟踪,提高了系统的控制性能。
最后验证系统在电阻失配情况下的参数鲁棒性,由于电阻对系统造成的影响很小,因此只进行了电阻改变为原来8倍的实验。表示估计电阻,Rs表示实际电阻,给定转速由600rpm 跃至800rpm。由图12 可以看出,传统预测在电阻变为原来的8 倍后,由于电阻失配造成电压扰动导致施加到电机上的总电压增加,因此在阶跃时反馈电流要比给定电流大。而使用ESO 对扰动电压进行观测与补偿后,可以实现扰动的快速收敛,因此设计的无差拍自抗扰系统对电阻也有较好的鲁棒性。
从实验结果可以看出,在电机参数准确时,两种控制方法都可实现电流的快速响应。在电机参数变化时,通过在传统无差拍电流预测控制中引入扩张状态观测器,可在实现电流预测的同时,大幅改善传统无差拍控制依赖参数的问题,提高了系统参数的鲁棒性,实验结果与理论分析结果一致。
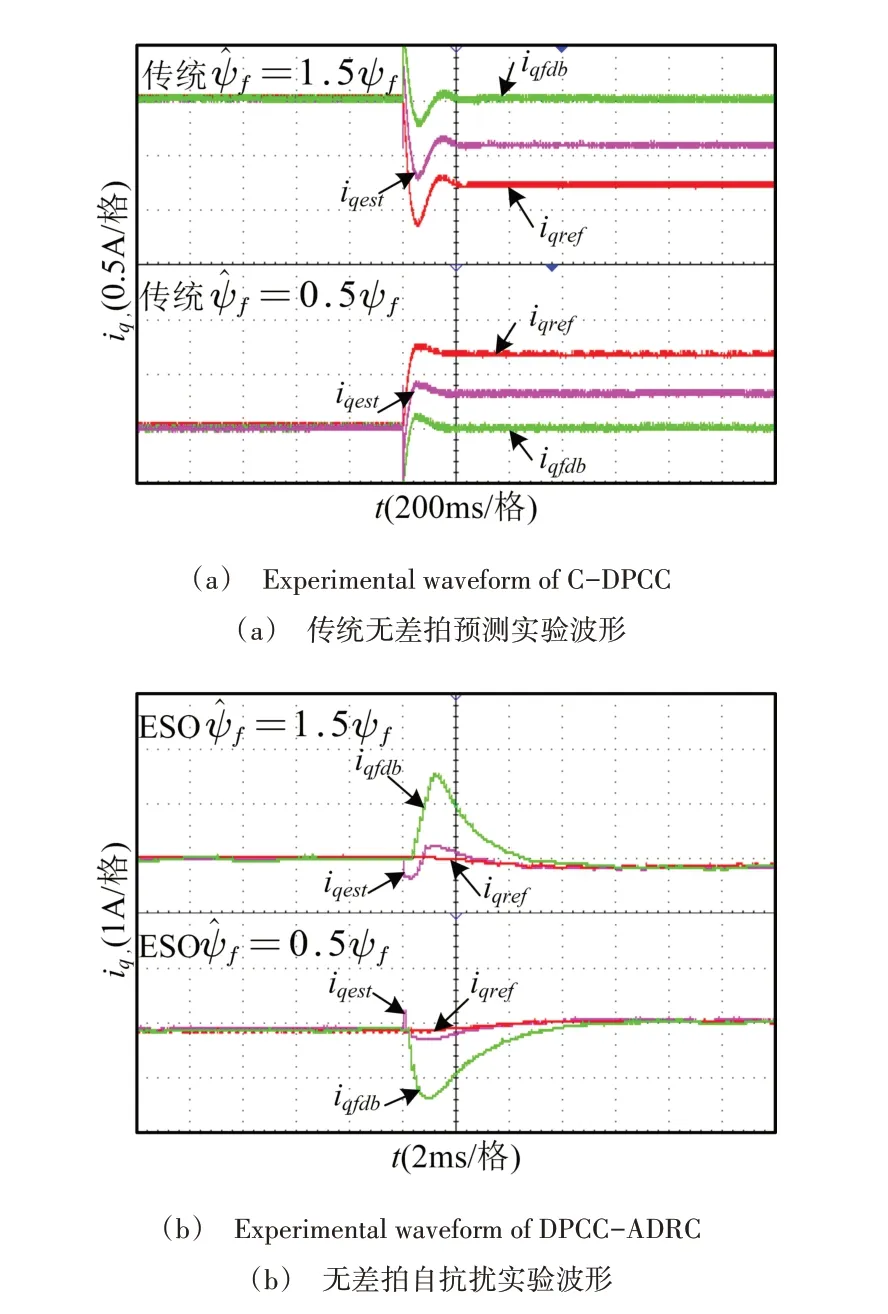
Fig.11 Experimental diagram in case of flux mismatch图11 磁链失配下的实验波形
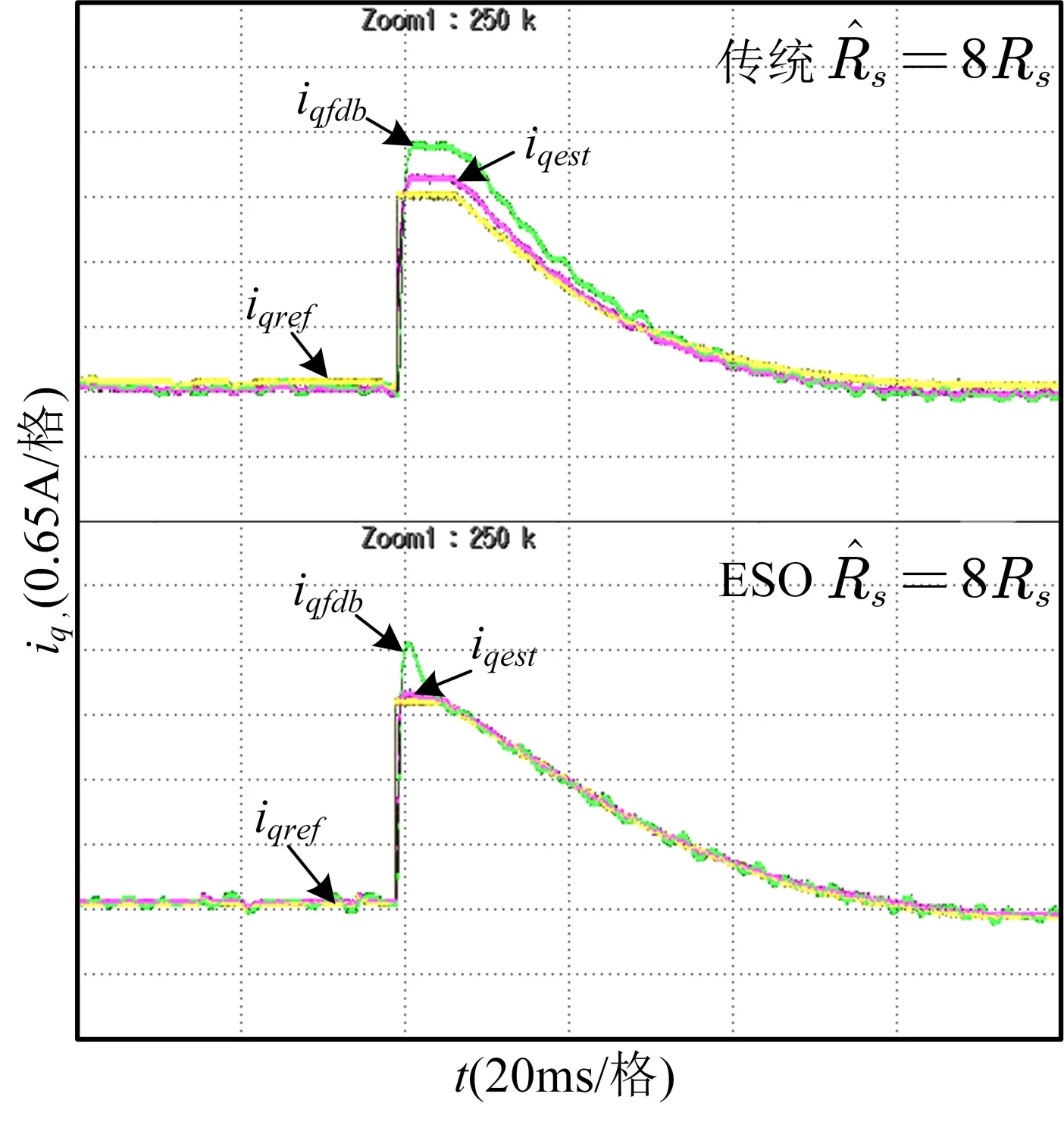
Fig.12 Experimental waveform in case of resistance mismatch图12 电阻失配下的实验波形
4 结语
针对传统无差拍电流预测控制参数鲁棒性较差的问题,本文提出一种基于自抗扰的无差拍预测电流控制算法。实验结果表明,无差拍自抗扰控制可以极大地增强系统参数的鲁棒性。然而,在电机的实际运行过程中,电机的电感、电阻和磁链有可能同时发生变化,并且变化范围不一定在本文所设定的范围内,因此后续需要在此基础上,研究在多变量变化以及在参数变化范围较大时依然具有较好鲁棒性的无差拍自抗扰控制方法。
猜你喜欢
电机与控制应用(2022年4期)2022-06-27 06:29:22
电机与控制应用(2022年4期)2022-06-27 06:29:18
农业机械学报(2020年2期)2020-03-09 07:35:30
中华建设(2019年7期)2019-08-27 00:50:18
雷达学报(2018年3期)2018-07-18 02:41:26
项目管理技术(2016年12期)2016-06-15 20:29:33
西南交通大学学报(2016年6期)2016-05-04 04:13:11
电源技术(2015年5期)2015-08-22 11:18:12
仪表技术与传感器(2015年12期)2015-06-08 04:26:33
电测与仪表(2015年21期)2015-04-09 11:51:56