1 550 nm相干激光测风雷达微弱回波信号处理
2022-05-13 14:31:38李宝林申向伟曾祥豹王音心中电科技集团重庆声光电有限公司重庆401332
压电与声光 2022年2期
李宝林,杨 冬,王 露,张 毅,申向伟,曾祥豹,王音心(中电科技集团 重庆声光电有限公司,重庆 401332)
0 引言
激光测风雷达能够测量仪器前方10 km远处的三维风场信息(包括风速、风向、风切变、湍流等),使风机提前停机,以规避大风、湍流等;以及提前使民航飞机、无人机规避风切变的不利影响,减少财产和生命的损失。其主要应用于风电、民航机场、无人机及军用无人机机场等领域。
本文研究的激光测风雷达采用1 550 nm波长脉冲激光器[1-2],脉冲激光具有脉冲宽度窄,峰值功率高及相干性高等特点,激光器发射的激光脉冲经过大气中气溶胶后向散射[3-4],返回到平衡探测器,信号处理电路对微弱回波信号进行模拟和数字处理后,能够实现风速远距离高精度测量。大气中气溶胶是由悬浮在空气中的固态或液态颗粒所组成的气态分散系统,气溶胶颗粒大小为0.01~10 μm[5],在中国区域内,气溶胶质量浓度为0.15~122 μg/m3,区域间差别巨大。
激光测风雷达的回波信号输入功率约为-80 dBm,信号微弱,需对回波信号进行模拟和数字处理,以提高回波信号的信噪比,实现风速的精确测量[6-7]。本文采用的模拟信号处理方法是对相干激光回波信号进行中频放大,数字信号处理方法是补零快速傅里叶变换(FFT)和FFT频谱累计,通过这些方法处理后可实现对激光测风雷达微弱回波信号中风速的正确拾取。
1 激光测风雷达微弱信号数学表达式
1 550 nm波长光纤激光器发射的本振光与声光调制器移频后的光信号进行干涉,干涉光信号经过光电转换后得到的电信号为
U(x,y,z)=A(x,y,z)cos[2πft+φ(x,y,z)]
(1)
式中:U(x,y,z)为干涉光光电转换后的电信号;A(x,y,z)为电信号振幅;f为声光调制器移频频率;φ(x,y,z)为电信号相位。
干涉光经过光学镜头发射,遇到前方空气中气溶胶会形成反射光信号,反射光信号经过环形器、耦合器和平衡探测器后,转换成回波信号的电信号为
U′(x,y,z)=A′(x,y,z)cos[2π(f+Δf)t+
φ′(x,y,z)]
(2)
式中:U′(x,y,z)为干涉光光电转换后的电信号;A′(x,y,z)为电信号振幅;Δf为空气中沿着激光发射光学镜头方向的风吹动气溶胶运动而引起的多普勒频移;φ′(x,y,z)为电信号相位。
当φ′(x,y,z)=φ(x,y,z)时,回波信号为相干信号,此时回波信号强度最强。当φ′(x,y,z)≠φ(x,y,z)时,回波信号为非相干信号,此时回波信号强度较弱。但即使回波信号为相干信号,气溶胶反射的回波信号也较弱,经过平衡探测器转换后回波信号输入功率约为-80 dBm,如图1所示。因此需对微弱的回波信号进行模拟中频放大,以及对 FFT频谱累积等模拟数字信号进行处理,以实现多普勒频移信息的提取。
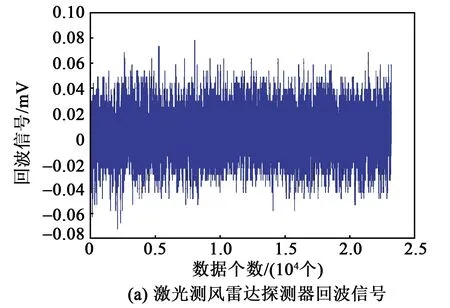

图1 未处理的回波输入信号图
2 激光测风雷达微弱信号模拟处理方法
激光测风雷达微弱回波信号频率为0~160 MHz,选用单片微波放大器SGA3586,在0~160 MHz内小信号增益为25 dB,每级微波放大电路如图2所示。采用两级微波放大电路串联方式,可将输入-80 dBm的回波信号放大为-30 dBm,放大后信号效果如图3所示。微波放大电路会将信号和噪声同时放大,不能提高回波信号的信噪比,故经试验效果后选取两级微波放大。经过两级微波放大后,回波信号直接进行FFT变换,但仍无法分辨出风速对应的多普勒频移,如图4所示。

图2 输入信号微波放大电路

图3 两级微波放大后的输入信号

图4 两级微波放大后单次回波信号FFT变换
信噪比ESNR为回波有效信号幅值As与噪声信号幅值An之比[8-9]:
(3)

3 激光测风雷达信号处理时序
激光测风雷达信号处理时序如图5所示。激光发射采用脉冲发射方式,以提高激光发射的瞬时功率,激光发射脉冲宽度设置为600 ns,回波信号为激光接收中对应距离门(表示采集激光测风雷达回波信号的时间范围)600 ns的数据,激光测风雷达要计算不同距离处的风速信息,需计算对应不同距离门600 ns数据的频谱信息。

图5 激光测风雷达信号处理每周期时序图
激光测风雷达激光发射脉冲周期为0.000 1 s,每个周期中包含不同距离门的回波信号,为了提高信噪比,需对不同周期的相同距离门频谱信息进行累积,累积时序如图6所示。

图6 频谱累积时序图
4 激光测风雷达微弱信号数字处理方法
4.1 补零FFT变换
激光测风雷达的Doppler频移大小与径向风速间[6-9]的关系为
(4)
式中:λ0为激光波长;v为径向风速;fD为多普勒频移;f0为激光频率。
风速测量精度0.1 m/s对应的多普勒频移为
(5)
如果要达到0.1 m/s的测风精度,FFT变换点数设置为N,需要满足:
(6)
由式(6)计算可知,要达到0.1 m/s的测风精度,FFT变换点数需满足N≥2 326。选取FFT变换点数为4 096。
激光测风雷达输入信号带宽为160 MHz,模数转换器(ADC)采样频率fs=400 MHz,激光发射脉冲宽度为600 ns,回波信号对应也是600 ns,在有效回波信号时间段内400 MHz采样只能采集240个点。因此,每个周期内采样点数需补充3 856个零数据点。
用信号源产生一个80 MHz、-50 dBm的信号(见图7)给信号处理板微波放大前端,信号处理板采集每个周期240个点数据加上3 856个补零数据,进行4 096点FFT变换结果为峰值频率是79.98 MHz(见图8),误差0.02 MHz,满足0.1 m/s测风精度要求。
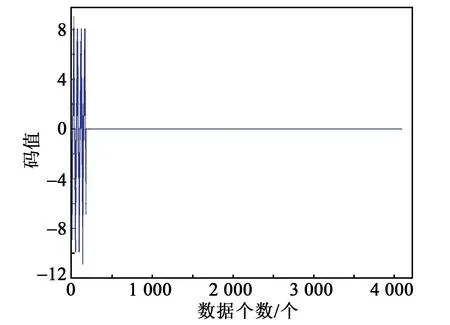
图7 信号源输入数据加补零数据图

图8 补零FFT变换结果
4.2 FFT频谱累积
用信号源产生一个80 MHz、-80 dBm的信号给信号处理板,经过微波放大再进入ADC,每个周期进行补零FFT变换,结果如图9所示。这个微弱信号FFT变换还是无法分辨出有用信号。在此基础上,通过FFT的频谱累积提高信噪比,设置FFT频谱累积次数为10 000次,累积结果如图10所示。累积后幅值最大的频率是79.98 MHz,与信号源间的频率差为0.02 MHz,优于0.129 MHz。由此,通过FFT频谱累积,提高了微弱信号的信噪比,实现了对微弱信号的频谱拾取。
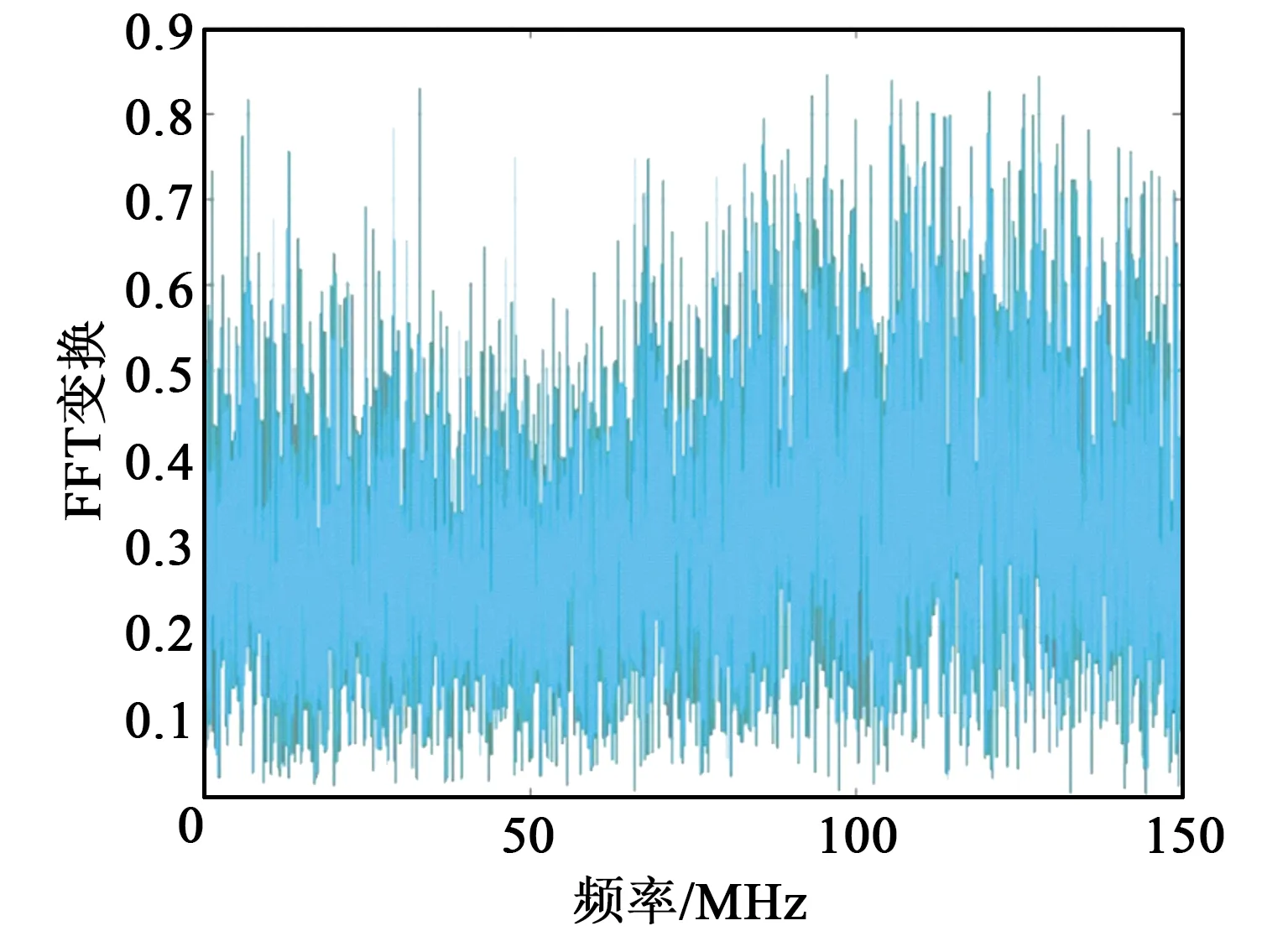
图9 80 MHz、-80 dBm信号单周期补零FFT结果
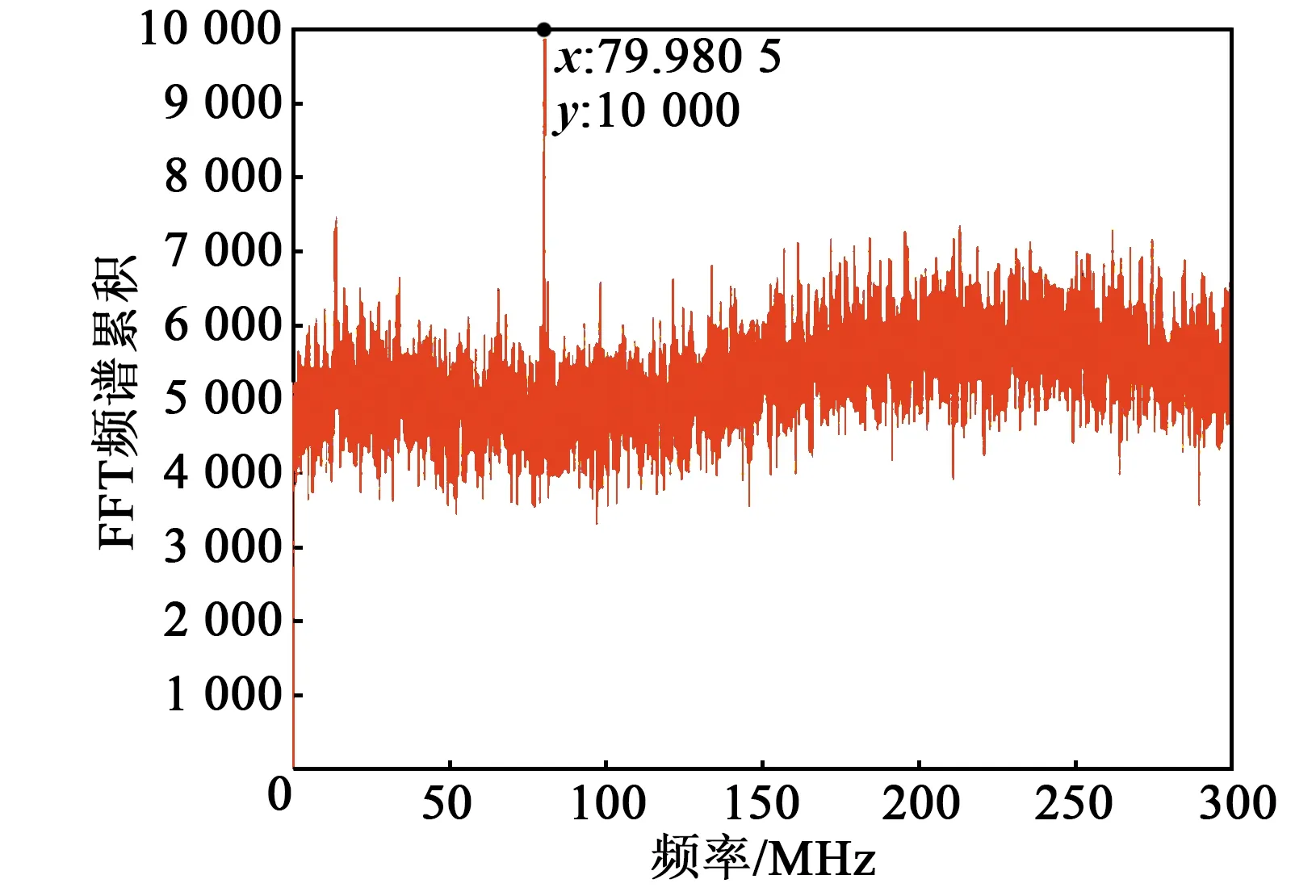
图10 80 MHz、-80 dBm信号经过两级微波放大
对上述信号源微弱信号进行验证后,在现场可编程门阵列(FPGA)内进行了频谱累积仿真试验,仿真单次幅值是401F75C2CD(十六进制),经过4次累积后累积幅值为1007DD70B34(十六进制),说明FPGA实现了频谱累积运算正确。FPGA频谱累积时序如图11所示。单次FFT变换结果如图12所示。频谱累积4次后结果如图13所示。
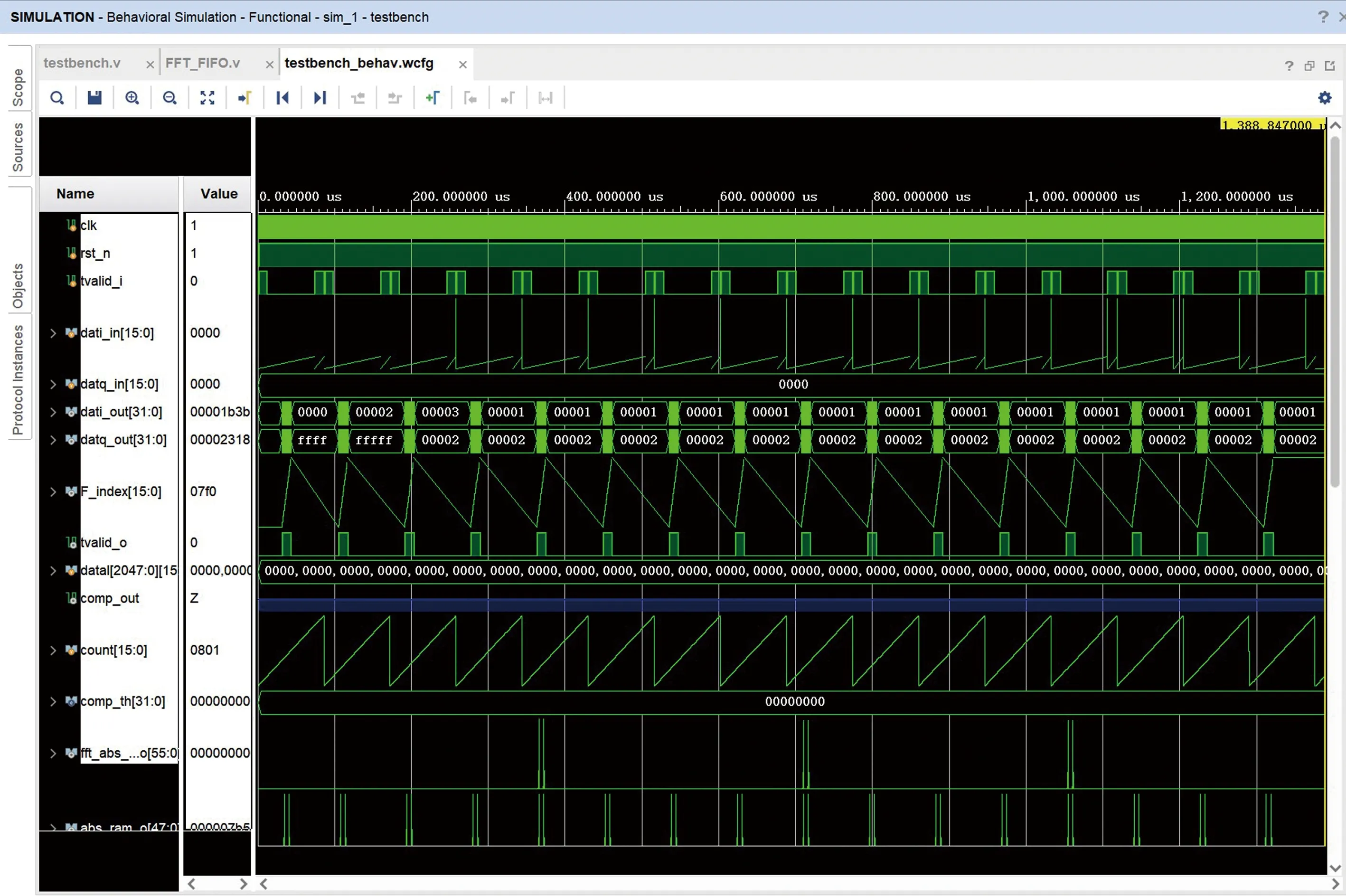
图11 FPGA频谱累积时序

图12 FPGA单次FFT变换结果

图13 FPGA频谱累积4次结果
5 试验结果
为了验证本文研究的激光测风雷达微弱信号处理方法的有效性,将信号处理电路连入整个激光测风雷达系统中进行了在线试验验证。激光测风雷达在信号处理电路上在线测试结果如图14所示。某标准测风设备测试结果如图15所示。

图14 激光测风雷达在信号处理板在线测试结果

图15 某标准测风设备测试结果
由图14可看出,设置的距离门为100 m,测试风速结果为-4.22 m/s。由图15可看出,标准测风设备中距离门为100 m的数据,测试结果风速为-4.28 m/s,误差为0.06 m/s。
针对不同距离门分别进行风速测量,测量结果如表1所示。由表可看出,每个距离门的风速误差均优于0.1 m/s。

表1 不同距离门风速测量结果
6 结束语
本文针对激光测风雷达回波信号微弱问题,采取了模拟和数字信号处理方式,在0~2 km内进行了风速测试试验,测得风速精度优于0.1 m/s。
本文采取两级模拟中频放大,虽然串联多级中频放大可将微弱回波信号放大,但由于信噪比未提高,微波放大级数并不是越多越好,因而选取合适的放大增益,并通过补零FFT和FFT频谱累积提高信噪比,实现了对激光测风雷达微弱回波信号多普勒频移信息的准确拾取。实验结果表明该方法达到了预期效果。
猜你喜欢
成都信息工程大学学报(2021年4期)2021-11-22 07:44:40
北京航空航天大学学报(2019年9期)2019-10-26 02:30:12
科技传播(2019年24期)2019-06-15 09:29:28
信号处理(2018年5期)2018-08-20 06:16:02
信号处理(2018年5期)2018-08-20 06:16:00
信号处理(2018年8期)2018-07-25 12:25:42
信号处理(2018年8期)2018-07-25 12:24:56
电子测试(2018年11期)2018-06-26 05:56:02
雷达学报(2017年3期)2018-01-19 02:01:27
北京航空航天大学学报(2017年9期)2017-12-18 07:12:22