轨道交通远程瞭望系统
2021-05-29 07:53:16张宇旻毛新德
现代城市轨道交通 2021年5期
张 强,张宇旻,毛新德,包 峰
(1.北京交通大学,北京 100044;2.北京埃福瑞科技有限公司,北京 100070;3.交控科技股份有限公司,北京 100070)
1 引言
列车在轨道交通线路空间运行,极其微小的失误都会导致重大的事故,因此保证线路空间的安全是提升列车运行安全性的重要手段。据统计,对于人类司机,每开车运行1亿km发生的致命事故有1~3 起,而在当前轨道交通领域,典型中等规模的城市年运行里程达3 亿km,因此,轨道交通线路空间的安全程度远远不够。人工监视线路的状况很难保证长时间专注,且在恶劣天气和夜间等光线不佳的情况下,车载视觉系统也难以对前方物体及时做出反应;另外,由于轨道交通运行速度较高,依靠车载感知系统感知障碍物的距离有限,因此车路协同系统必不可少。
为保证线路空间安全,本文提出一种轨道交通远程瞭望系统,即在列车运行时,对轨道前方的列车、行人以及轨面上方突发侵入的障碍物进行远距离实时监测和预警;同时在列车运行的高危路段布置相应传感器,监控周围环境与障碍物信息,并通过车路协同网络进行交互。当列车与障碍物的距离小于一定的安全距离时,列车将自主制动,同时将前向障碍物信息上报到列车运营控制中心。
2 远程瞭望系统构成
远程瞭望系统总体架构如图1所示,主要由车载感知系统(鹰眼系统)和车路协同感知系统(轨道星链)2 部分组成。其中,车载感知系统通过列车搭载的传感器实现列车视距内的自主监控与障碍物检测;通过在隧道口、站台、公跨铁、道口等关键高风险区域布置车路协同系统,实现视距外的协同感知,同时使用自主、局域、全局3层网络进行车路云通信,构建整个系统网络结构。
2.1 车载感知系统
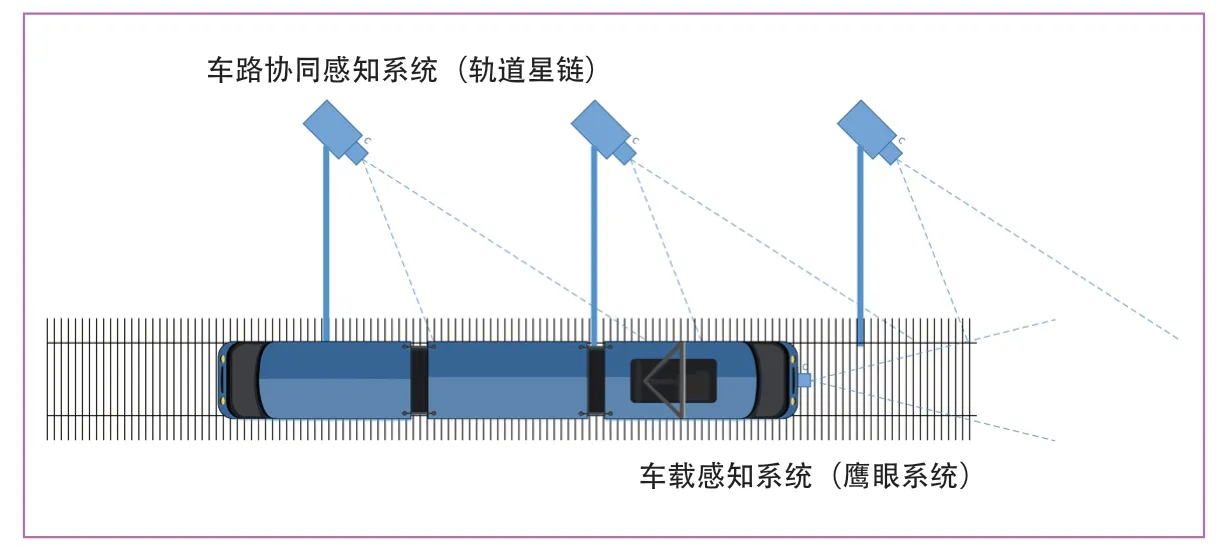
图1 远程瞭望系统总体架构
车载感知系统由障碍物识别系统、列车车速测量系统和三维地图构建系统3部分组成。障碍物识别系统在接收到工业相机和激光雷达的数据后,通过人工智能算法对图像中的轨道区域进行感知识别,并对前向轨道中的障碍物进行识别;列车速度测量系统基于毫米波雷达,采用自适应聚类算法测量列车相对速度,根据车速进行积分实现列车精确定位;三维地图构建系统基于激光雷达,通过特征匹配获取自身的定位并建立周边的三维地图。由于列车自主监测前方障碍物信息,因此无须与车路协同系统进行通信。
2.1.1 障碍物识别系统
列车在运行时,对前向障碍物(列车、轨道中的行人、信号灯等)有效的识别可以保障其运行的安全。障碍物识别系统包括轨道区域识别和障碍物检测2部分。
(1)轨道区域识别部分。该部分首先通过视觉与激光雷达传感器联合标定方法实现异构数据的时空统一,从而获取包含颜色、深度以及反射率的高维向量;然后通过高维输入的卷积神经网络语义分割和循环神经网络结构提升场景语义关联性,实现轨道线路的边界分割;最后运用分割线路边界后端优化方法实现对高速列车行驶区域的精准分割。
(2)障碍物检测部分。该部分首先通过融合的激光雷达与摄像头数据,根据轨道区域识别结果,在检测的轨道区域内运用注意力集中网络对三维空间内周围环境的候选障碍物进行提取;然后采用成熟的轻量化图像分类网络,在二维空间内对提取的候选障碍物进行分类;最后,在三维空间中进行目标边界框精准回归。此外,该系统采用距离交并比损失函数对整个网络模型参数进行优化训练,从而可高精度地识别障碍物。
2.1.2 列车速度测量系统
由于列车行驶线路固定,因此精准的列车速度测量可进一步提升该系统对列车前向环境的感知精度和环境理解能力。
在列车速度测量系统中,首先通过毫米波雷达获取环境信息,采用自适应聚类算法对毫米波雷达反射的障碍物点进行聚类;然后结合多普勒效应反推出列车实时速度,并进一步通过速度积分估计出列车在关键区间内的位置,从而实现列车精准定位。
2.1.3 三维地图构建系统
精准的列车定位与三维地图能够提升对列车周围环境的感知精度。列车可以根据定位信息,从云端三维地图中获取列车周围障碍物信息,实时更新周围的障碍物。三维地图构建系统包括预处理、特征匹配和回环检测3部分。
(1)预处理部分。预处理部分根据反射强度等信息对获取的点云数据进行预处理,剔除点云中的异常点,再通过计算点云内部点的曲率提取线特征点与面特征点。
(2)特征匹配部分。特征匹配部分根据提取的线、面特征点,将点云与历史点云数据进行特征配准,以获取点云之间的对应关系,并对点云帧内的畸变进行矫正;再与全局地图进行匹配,针对列车运动进行初步估计,可获得粗里程计。
(3)回环检测部分。回环检测部分建立起列车线路中关键位置的点云特征库,包括点云局部特征库和全局特征库。在列车运行过程中,回环检测部分实时提取激光传感器采集的点云特征,并与数据库进行特征匹配,实现列车在运行过程中的关键位置重定位与回环检测,从而优化列车的位置姿态与周围地图,可获得线路的全场景高精度定位与精确的行驶环境三维模型。
2.2 车路协同感知系统
车路协同感知系统由网络通信系统和路侧感知系统组成。网络通信系统通过车路通信网络将车、路感知信息进行交互融合,从而实现车路协同;路侧感知系统与车载感知系统相似,也具有障碍物识别和三维地图构建的功能。
2.2.1 网络通信系统
网络通信系统是通过交通要素间快速、准确的信息交换实现的,因此,高可靠、低时延的网络通信系统是车路协同的基础。车路协同感知系统通过路侧设备实现路网周围环境与列车信息的采集,从而实时获得高风险轨道区域的障碍物信息,在处理后运用网络通信系统传送给云平台中心。同样,道路信号灯信息、路侧感知到的障碍物信息、路侧设备周围环境信息也通过车路通信网络传输到云平台,从而在云平台实现全局感知,辅助车辆进行驾驶行为决策。网络通信系统采用自主、局部、全局3层网络进行通信,其中列车根据车载传感器进行自主感知,路侧设备分区段进行局部感知定位,再将路侧与车载传感器信息整合到云平台实现运行线路的全局感知。
2.2.2 路侧感知系统
路侧感知系统同样可以实现对列车、行人和信号灯的检测,其技术和方法与车载感知系统相似。路侧设备不像列车设备受空间和质量的限制,其具有更强大的算力,并能使用更先进的技术方法。路侧感知系统在识别后可以及时地将检测结果通过网络通信系统发送给路网中的车辆,从而实现列车的远距离超视距感知。
3 测试验证
3.1 实际安装情况
远程瞭望系统已经在北京地铁燕房线、上海地铁6号线、成都地铁3号线、港铁荃湾线等线路进行了全面测试,测试数据超过2 TB,其中包含直道、弯道、隧道、高架等丰富场景和多种光照条件下的特性。目前已经将上述线路作为典型的产品应用线路,并对其开展了系统全面的功能测试及系统能力分析。远程瞭望系统传感器包括1个长焦模组和1个短焦模组。长焦模组用于远距离障碍物识别,短焦模组用于近距离障碍物识别,每个模组都由1个激光雷达和1个摄像头组成。
为便于现场施工和车辆实际安装,远程瞭望系统应采用高柔性化设计,针对每款车型的实际安装空间采取定制化安装方案。对于中间设有安全逃生门、两侧设有安全观察室的列车,其远程瞭望系统采用在观察室及车顶2种不同的安装方案,可从不同的安装位置全面测试远程瞭望系统,从而验证其算法鲁棒性以及产品安装适配的广适性。观察室安装方案设计图如图2所示,车顶安装方案示意图如图3所示。
根据列车实际环境定制安装方案。观察室视觉与激光传感器的实车安装及效果如图4所示,视觉与激光传感器在列车车顶实际安装效果如图5所示。远程瞭望系统主机选择安装在驾驶室顶端内部,外部不留任何线缆,与车辆系统不存在信号交互,不会影响车辆正常运行,如图6所示。
3.2 实际测试情况
远程瞭望系统采集的数据包含晴天、阴天、雨天、白天、夜晚等多种天气情况,直道、弯道、隧道等多种路况,涵盖了列车正常运行所面临的所有场景和路况。本文针对港铁荃湾线远程瞭望系统运行情况做了具体性能分析,主要性能指标包括障碍物的检测距离、漏识别率、误识别率、测距误差等,如表1所示。此外,本系统针对直道、弯道、隧道的测试性能进行了详细统计,并通过自动化分析工具和人工监督方式进行了交叉验证。验证结果表明,远程瞭望系统各项功能指标均通过验证,安全等级(SIL)达到SIL2要求。部分测试效果如图7所示。
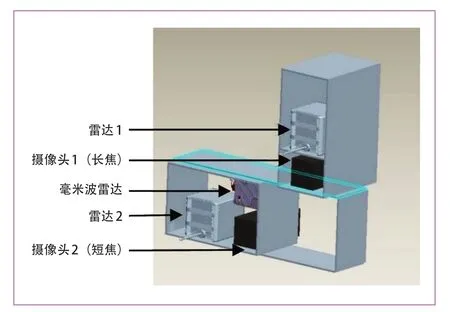
图2 观察室安装方案设计图
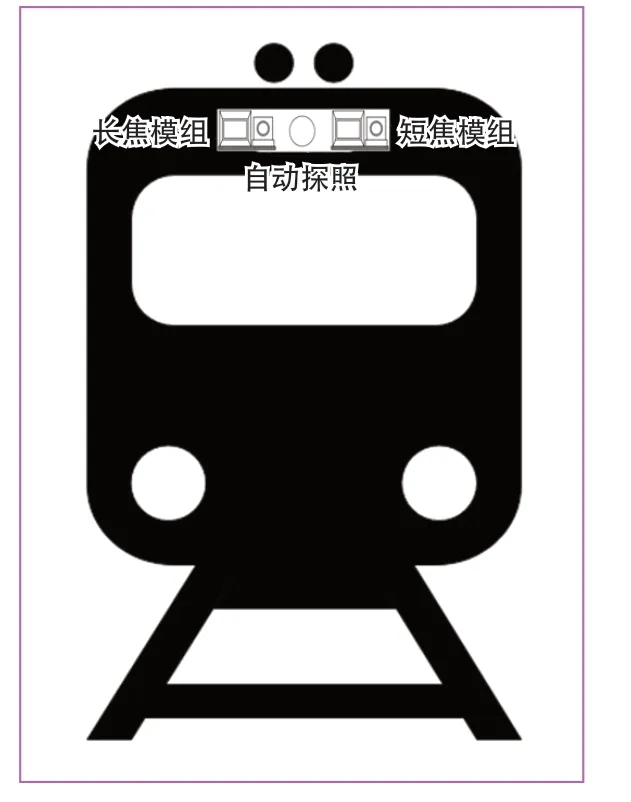
图3 车顶安装方案示意图
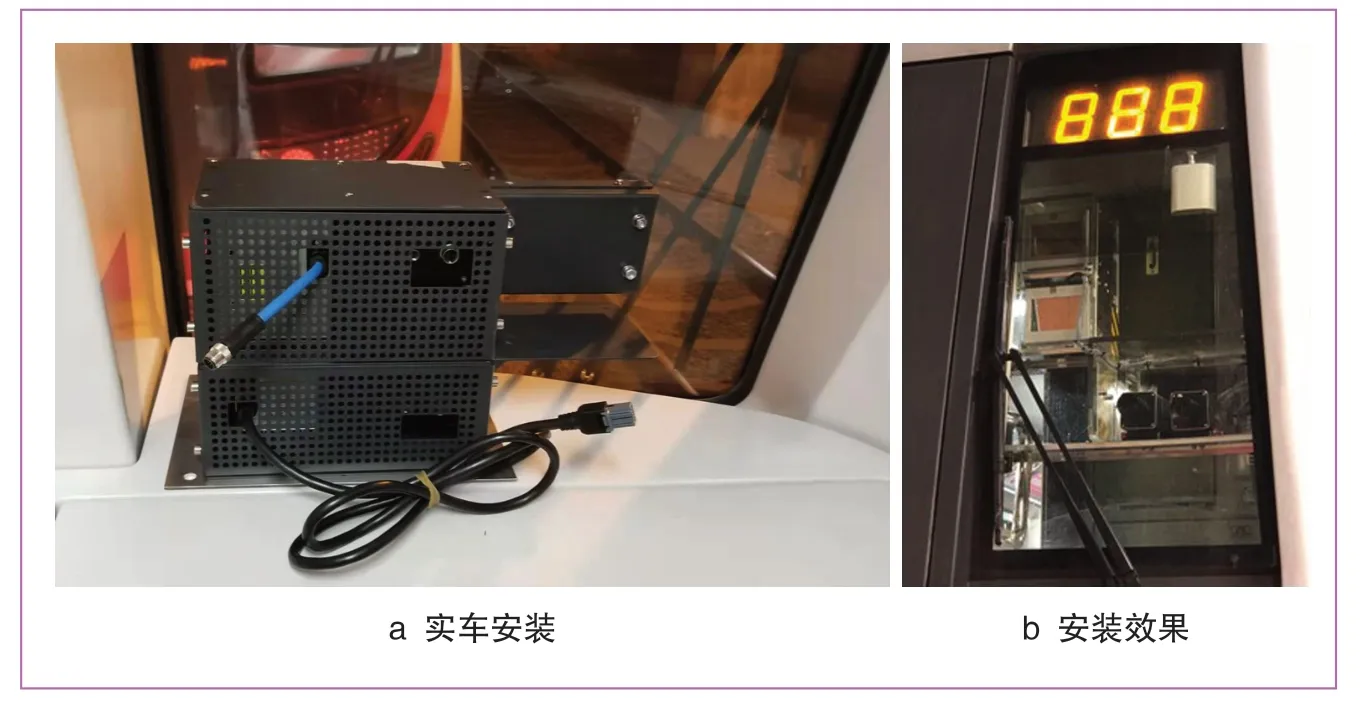
图4 观察室视觉与激光传感器的实车安装及效果

图5 列车车顶视觉与激光传感器安装效果

图6 远程瞭望系统主机安装位置及外观
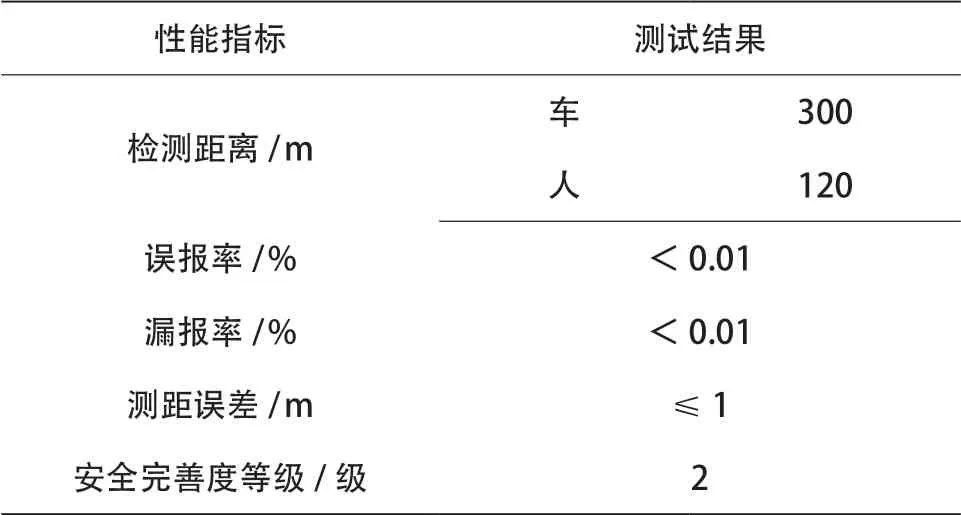
表1 远程瞭望系统性能指标
4 展望
在SIL2安全等级下,远程瞭望系统在未来轨道交通信号系统故障环境下,可独立地进行车辆运行防护,为实现信号系统快速恢复争取时间,提升车辆系统的运行安全性和效率,成为信号系统故障环境下降低运行影响的必备产品。本文介绍的远程瞭望系统中的车载感知系统通过标定的高维特征实现精准的轨道识别,采用注意力集中网络实现远距离障碍物识别,创新性地采用多层次视觉雷达融合算法完成轨道环境建模;车路协同感知系统将感知算法布署在路侧设备上,根据提出的3层网络通信进行车路快速协同,实现列车超视距感知。未来随着人工智能(AI)技术的进一步发展,远程瞭望系统会得到进一步完善并产生更加深远的影响。
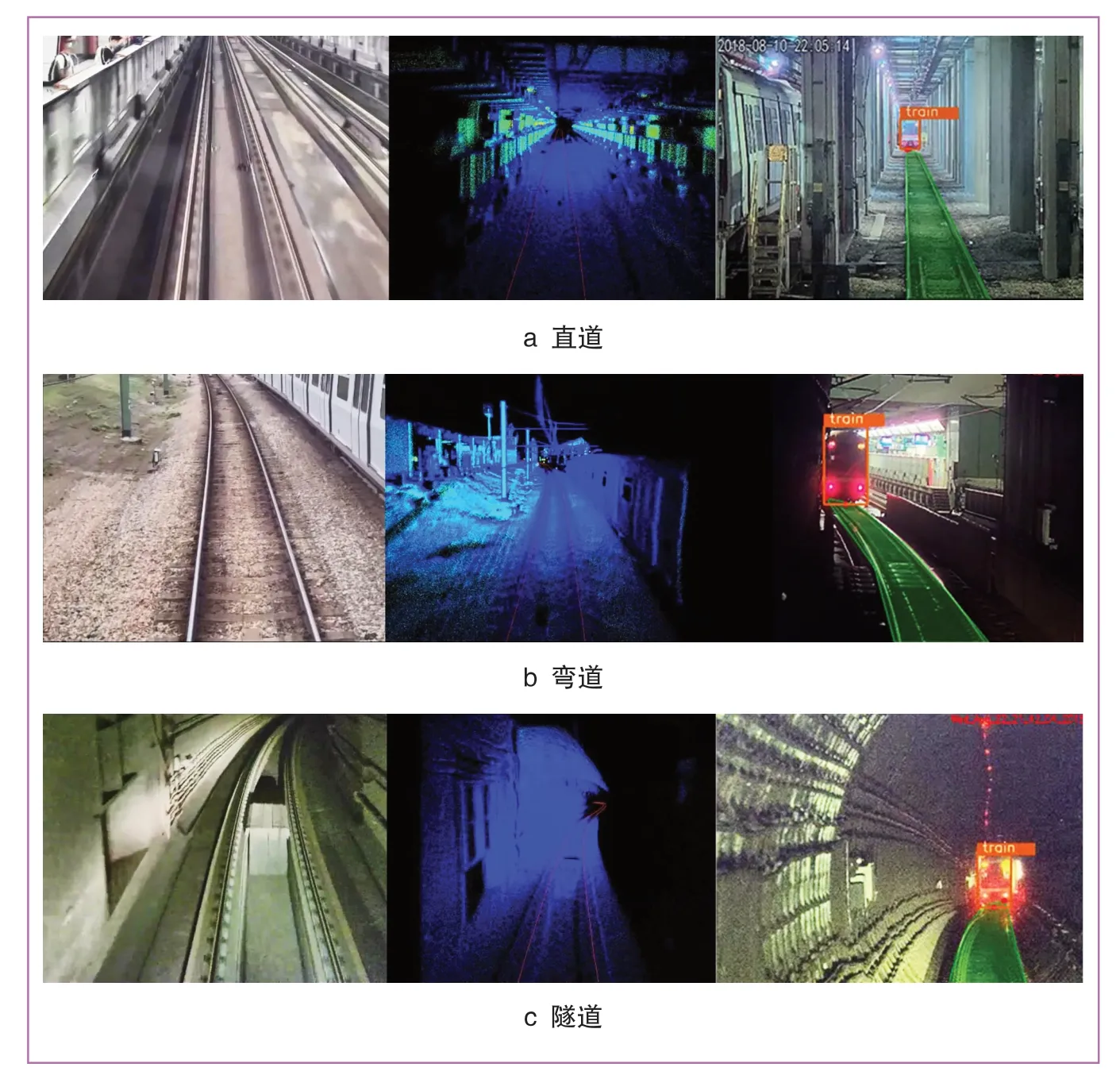
图7 部分识别测试效果
猜你喜欢
动漫界·幼教365(中班)(2020年3期)2020-04-20 11:03:27
铁道通信信号(2020年9期)2020-02-06 09:15:54
电子制作(2019年15期)2019-08-27 01:11:48
汽车观察(2019年2期)2019-03-15 05:59:54
通信电源技术(2018年3期)2018-06-26 06:33:46
电子制作(2018年1期)2018-04-04 01:48:30
中国交通信息化(2018年12期)2018-03-21 05:52:32
电子制作(2017年17期)2017-12-18 06:41:06
城市道桥与防洪(2014年5期)2014-02-27 07:26:44