基于STM32的捷联惯导系统软硬件设计
2021-01-23 08:05:18任晓峰
通信电源技术 2020年19期
任晓峰
(北京星网宇达科技股份有限公司,北京 100176)
0 引 言
本飞行姿态控制系统的惯性导航系统的陀螺仪、加速度计采用MEMS陀螺仪、MEMS加速度计。此设计惯性导航系统在经济成本、设备体积大小、设备的质量大小方面更具有优势,被广泛地应用在军事、民用的多个方面[1]。陀螺仪主要是用来测量几个方位的角速率的大小;加速度计主要用来计算和测量惯性导航系统及相关载体之间存在的引力加速度、绝对加速度。然后通过相关的传感器将测得这几项数据指标发送到处理器中进行处理。
1 发展过程与国内外现状
1.1 发展过程与国外现状
惯性导航属于一种先进的科学技术,20世纪才逐渐开始发展,最早出现在德国。当时德国科学家通过陀螺仪与加速器来设计火箭当中的惯性系统,用于火箭的定位。二战后,美国与苏联也开始发展惯性技术,并且用于制造军事武器,从而推动了惯性技术在军事现代化中的发展,被应用在飞机、导弹、舰船中,促进了它们的高速发展与运用。20世纪50年代初期,美国研发出了具有稳定性的三轴陀螺惯性导航系统,进一步将导航技术推向新的台阶。接着20世纪50年代至20世纪60年代,惯性导航系统已经被广泛应用在火箭发射、导弹、宇宙飞行器定位、舰船航行、测绘等领域。进入20世纪80年代,惯性导航系统开始融入在计算机控制技术中,并且推动了数学平台的发展。20世纪90年代后,惯性导航系统开始被应用在各种运载体中。
计算机系统、电子线路、惯性仪表及各种精密机械仪器等的不断发展与改进,各种繁杂技术、矫正技术等的软件得以完善,进一步加大了惯性导航系统的运用,提高了其精度与可靠度。惯性导航系统现已在舰艇、潜艇、战机、战车、导弹以及人造卫星等各个领域中被广泛应用,并且随着经济成本降低以及技术的普及,各式各样的飞机、机器人、检测设备等都对其要求更高。
近年来,虽然无线电导航、天文导航及卫星导航等技术不断地发展,但是依然取代不了惯性导航系统所特有的作用与特点。尤其对于军事领域,惯性导航系统始终处于主导地位。因此,惯性导航系统的性能会发展得越来越好,结构会更加优化。
1.2 国内现状
20世纪50年代以来,我们国家开始逐渐研发惯性相关的仪表,到目前已经完成了导弹、卫星等惯性导航系统,并且已经投入了生产。运载火箭的成功发射,标志着我国惯性技术的发展已经有了一定的水平,具备了自主设计、研发、生产的能力。但是,与发达国家相比,我国的惯性导航技术与规模都还有很远的距离,需要科研人员迎难而上,取得更大的进步。
2 主要组成元件
不同的惯性导航系统的组成存在一定的差异,而且同一类型的导航系统如果运载体不同,那么惯性导航系统的组成也会不同。本文以STM32平台为基础,设计出了一种用来监测体姿态的惯性导航系统。惯性导航系统的硬件组成包括陀螺仪、加速度计、采集与解算单元、电源单元及对外交互单元。
2.1 陀螺仪
本设计选用的是MEMS陀螺仪,实现测量载体的运动角速度。MEMS陀螺仪选用的是芯动联科的MGZ206XHC,此器件的对外通信接口为4线全双工SPI总线,陀螺仪作为SPI总线从设备。陀螺仪需要5 V数字电源、5 V模拟电源和3.3 V接口I/O电源三路电源供电。STM32通过物理层SPI总线实现数据读取,首先读取data_ready寄存器,当data_ready有效后,读取角速度数据和温度数据。数据读取频率可以达到2 000 Hz,满足设计需求。
2.2 加速度计
本设计选用的是MEMS加速度计为芯动联科的MAX535LC,此加速度计的测量范围为±30 g,零偏重复性小于5 mg。加速度计内部集成了高精度模数转换器,使得器件的分辨率达到0.004 mg。外部接口亦是SPI接口。数据读取的流程类似于上述陀螺仪的读取工程。数据读取频率同样可以达到2 000 Hz,满足设计需求。
2.3 采集与解算单元
惯性器件的采集单元负责完成原始数据的实时读取和实时解包解算,本设计的采集频率为1 000 Hz,由主控器STM32通过两路SPI接口采集惯性数据。其中一路SPI接口负责顺序采集3轴陀螺仪的角速度信息,另一路SPI接口负责顺序采集3轴加速度计的加速度信息。STM32将收到的数据解包解算出惯性信息和温度信息,再将数据按照协议要求打包送到导航解算系统。导航解算单元主要基于惯性器件的采集系统,对惯性数据进行补偿运算和捷联运算,输出角速度、加速度、姿态、速度及位置等信息。
2.4 电源单元
选用隔离式DC-DC模块,内部集成了输出短路、输出过流自恢复保护电路,2 000 V的隔离耐压具有较宽的电压输入范围9~36 V,满足大部分供电标准。工作温度范围为-40~85 ℃,全温的转换效率达到85%以上。使用EMI电源滤波器,降低电磁干扰,同时电路上选用肖特基二极管和TVS二极管(P4SMA36CA),用来应对供电错接和瞬态突波。此外,采用按照标准设计的EMC电路,将电磁兼容性的影响降到最低。图1为隔离电源原理框图。
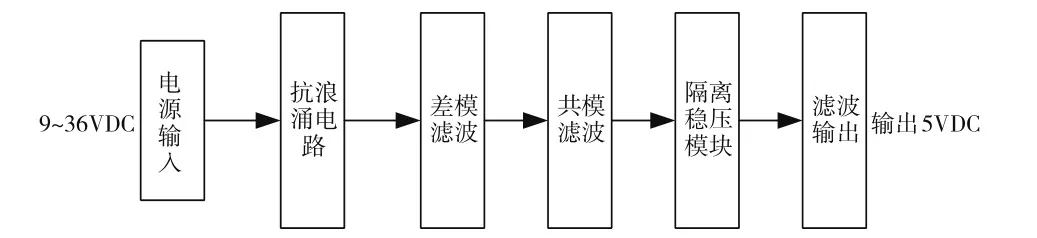
图1 隔离电源原理框图
2.5 对外交互单元
数字通信接口均采用隔离式设计,通过隔离式电源模块将内部数字地与外部隔离地隔离开。同时采用TI公司高速隔离芯片,转换速率高达10 Mb/s,芯片隔离内部采用3.3 V供电,隔离外部采用5 V供电。在通信接口就近接入ESD防护器件,防止接口静电对系统的影响。
3 工作原理与数学建模
3.1 工作原理
惯性导航技术属于先进的一种导航方法,采用运载体的加速度来执行导航任务。由惯性定律可知,采用陀螺仪与加速度计来测量STM32平台载体的惯性信息,然后按照积分运算来获得导航的速度与位置[2]。
3.2 数学建模
3.2.1 坐标系的建立
(1)地理坐标系的建立
建立oxyz的地理坐标系,以地球表面为原点o,东方为x轴,北方为y轴,垂直向上为z轴。惯性导航系统在分析时使用最多的坐标系就是地理坐标系,随着地球的转动、运载体的运动而进行运动。
(2)平台坐标系的建立
建立oxGyGzG的平台坐标系,将陀螺仪、加速度计安装到基于STM32平台的姿态监测系统中。zp轴与STM32的平台平面垂直,平台北面是yp轴,平台东面是xp轴。地理坐标系oxyz与平台坐标系oxpypzp之间的夹角记为α、β、γ[3]。
(3)陀螺坐标系的建立
建立oxGyGzG的陀螺坐标系,不计算回路中的误差和陀螺的安装误差的情况下,陀螺坐标系与平台坐标系会发生重合,所以在具体的分析过程中,可采用平台坐标系来代替陀螺坐标系。
3.2.2 数学模型
为了降低计算机程序的复杂程度以及转换惯性导航系统的工作状态,需要将惯性系统的各种工作状态用数学模型进行表示,从而用一组程序方程式就能对惯性导航系统的工作状态进行转换。因此,建立统一的数学模型有利于对惯性系统的进一步研究,也有利于在程序上进行调试和运用。通过切实可行的数学模型在一定程度上减少了计算机的内存单元,使得设备更加简洁、易操作。
4 仿真实验与误差
4.1 仿真实验
对惯性导航系统进行模拟仿真一方面是在计算机上根据惯性导航系统的工作原理、特性、误差、参数等来进行选择,另一方面是通过惯性导航系统来控制计算机,从而进行仿真。后一种方式包括对参数进行调整、对程序进行验证和测试。这两种模拟仿真方式都是将数学模型运用在计算机上来实现结果,所以要将数学模式和计算机进行结合使用。
4.2 误差分析
惯性导航系统比较复杂,所以容易产生误差的地方也比较多。对惯性导航系统进行误差分析,也即是对系统中涉及到的各个参数进行分析。在本次实验研究中所涉及到的误差来源包括陀螺漂移、加速度计以及其他的一些误差,按照误差的来源性质可以分为如下5种。
(1)惯性元件带来的误差。惯性导航系统的主要惯性元件包括陀螺仪、加速度计及磁罗盘。其中,陀螺仪可能造成的误差包括漂移、力矩的标度[4];加速度计可能造成的误差包括零位、标度因素等。
(2)安装过程中造成的误差。平台在安装时的三环框的垂直度可能造成的误差。
(3)初始值的设置误差。在安装加速度计时,由于加速度计测量的是平台方向的加速度,如果刚开始的平台初始角度与计划的不相符,也会导致惯性系统本身的一个误差。
(4)系统原理与计算方法造成的误差。在惯性系统的数学建模过程中,所涉及到的各种运算公式以及在计算机中的算法和运算都可能带来误差。
(5)外界信息所造成的误差。惯性系统在工作状态转换的过程中,由于设备的信息问题而导致在测量过程中所产生的误差,也会使得惯性系统产生误差。
5 系统的软件设计
对于计算机控制系统,相关的硬件结构与配置非常重要,但更重要的是软件设计与程序开发的技术。惯性导航系统必须采取微处理器来监视整个运行的环境与运用的导航设备,对各种事件进行及时而准确地响应。按照惯性导航系统所需要的功能来设计软件系统,主要包括3个方面。
第一,软件系统的接口。软件系统的接口模块是实现硬件数据流的输入输出,从采集信号、数据解包到数据传输,并且实现惯性导航系统的数据的对外输出等。
第二,软件系统的计算。惯性导航系统的运算主要包括惯性导航系统工作状态时的测量、漂移、定标、初始对准等,从而实现定位功能。
第三,软件系统的交互设置。系统的交互是人与计算机之间的交互,包括导航系统的航向、速度,硬件设备的位置、速度、各项参数值、加速度、时间、加速度计的零位及陀螺仪的漂移参数等。此外,还可以设置与显示相关的工作状态、工作方式及工作切换等。
6 结 论
本文是基于STM32平台来设计的一个监测姿态的系统,硬件部分核心部件包括陀螺仪、加速度计、采集与解算单元、电源单元和对外交互单元。在本次体姿态系统的惯性导航系统中使用的是MGZ206XHC的陀螺仪和MAX535LC的加速度计。
在设计之前,先阐述了姿态惯性导航系统的工作原理,然后通过数学建模来呈现惯性导航系统的各种工作状态,再通过仿真实验的方式将建立的数学模型运用在STM32中进行实现,最后介绍了系统的软件设计部分,实现导航数据运算处理,将矫正后的数据发送到控制系统中来实现相关的控制与操作。
猜你喜欢
中国特种设备安全(2021年5期)2021-11-06 05:09:08
北京航空航天大学学报(2021年9期)2021-11-02 08:24:32
军民两用技术与产品(2021年7期)2021-10-13 08:12:10
湖北农机化(2020年4期)2020-07-24 09:07:44
百科探秘·航空航天(2017年9期)2017-12-31 07:24:12
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
山东工业技术(2016年15期)2016-12-01 05:32:01
光学精密工程(2016年5期)2016-11-07 09:06:41
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
中国惯性技术学报(2015年1期)2015-12-19 13:11:49