基于信息融合的机器人环境建模
2019-10-21 08:00:32黄尚锋
天工 2019年6期
黄尚锋
[摘 要]机器人工作环境对机器人的准确移动有着十分重要的意义。机器人的环境建模对实现机器人自主性起到基础性作用。
[关键词]环境建模;机器人;工作环境
一、环境建模的分类
机器人的工作环境错综复杂,因此构建机器人工作环境十分必要。当今在环境建模领域,已经诞生出多种理论方法来探究周边工作环境。Bücken等人创造出栅格地图法、拓扑图法、利用外界传感器反馈的信息表示环境等方法。
二、多传感器环境建模
现代多数机器人利用传感器来采集周边信息,通过二维矩阵存储数据,经过计算比较呈现出相应的概率值,提供可参考的可信度。若机器人周边环境比较嘈杂,传感器采集信号干扰性强,则会产生较低的概率,可信度较低。利用二维栅格阵法就可以消除外界干扰,获得较好的可信度。图1为传感器探测图。
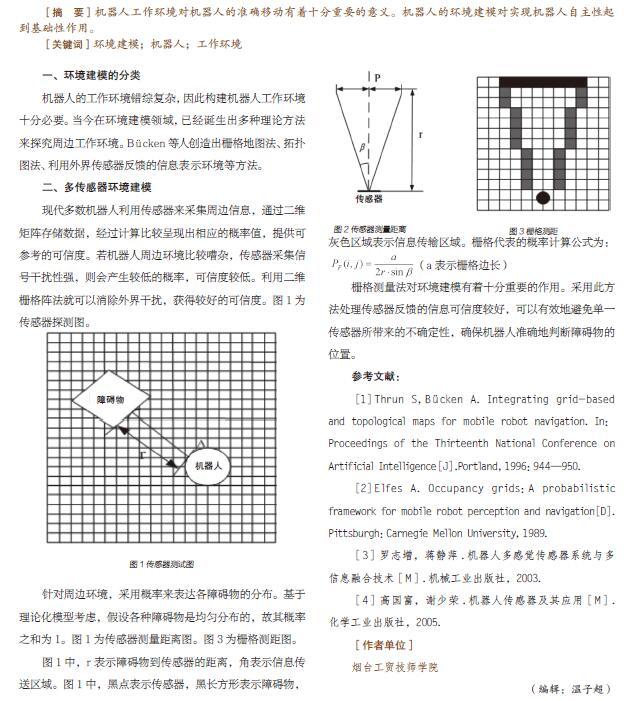
针对周边环境,采用概率来表达各障碍物的分布。基于理论化模型考虑,假设各种障碍物是均匀分布的,故其概率之和为1。图1为传感器测量距离图。图3为栅格测距图。
图1中,r表示障碍物到传感器的距离,角表示信息传送区域。图1中,黑点表示传感器,黑长方形表示障碍物,灰色区域表示信息传输区域。栅格代表的概率計算公式为:(a表示栅格边长)
栅格测量法对环境建模有着十分重要的作用。采用此方法处理传感器反馈的信息可信度较好,可以有效地避免单一传感器所带来的不确定性,确保机器人准确地判断障碍物的位置。
参考文献:
[1]Thrun S,Bücken A. Integrating grid-based and topological maps for mobile robot navigation. In:Proceedings of the Thirteenth National Conference on Artificial Intelligence[J].Portland,1996:944—950.
[2]Elfes A. Occupancy grids:A probabilistic framework for mobile robot perception and navigation[D]. Pittsburgh:Carnegie Mellon University,1989.
[3]罗志增,蒋静萍.机器人多感觉传感器系统与多信息融合技术[M].机械工业出版社,2003.
[4]高国富,谢少荣.机器人传感器及其应用[M]. 化学工业出版社,2005.
[作者单位]
烟台工贸技师学院
(编辑:温子超)
猜你喜欢
金桥(2019年10期)2019-08-13 07:15:16
上海医药(2017年4期)2017-03-08 18:23:08
未来英才(2016年22期)2016-12-28 13:36:18
数字技术与应用(2016年9期)2016-11-09 23:48:00
中国市场(2016年27期)2016-07-16 04:18:03
科技视界(2015年35期)2016-01-04 09:59:37
中国高新技术企业(2015年27期)2015-07-30 14:17:46
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08