
双鸭嘴式大蒜正头装置调头机理分析与试验
2018-12-04 09:03:34侯加林黄圣海牛子孺吴彦强李天华
农业机械学报 2018年11期
侯加林 黄圣海 牛子孺 吴彦强 李天华
(1.山东农业大学机械与电子工程学院, 泰安 271018; 2.山东省园艺机械与装备重点实验室, 泰安 271018)
0 引言
我国是世界上大蒜种植面积最大的国家,据统计2017年大蒜种植面积达37.9~40.5万hm2[1]。目前我国大蒜生产仍以人工为主,劳动强度大、效率低、成本高,现有的大蒜生产机械存在无法满足农艺要求、作业效果不佳等缺点,播种后鳞芽正头率低,已经成为制约大蒜机械化直立播种的关键因素[2-10]。
离散元技术可有效分析颗粒状物质的动力学行为,在多个领域已广泛运用[11]。在播种机械中采用离散元技术,对玉米排种以及玉米颗粒参数标定进行模拟仿真,分析其影响因素,所获得的仿真结果与试验数据基本一致[12-14]。在施肥机械中利用离散元技术对施肥装置关键部件进行关键影响因素分析以及参数优化,仿真与验证试验结果相吻合[15-16]。在物料输送机械中采用离散元技术对输送机械性能的影响因素进行分析,以及对输送机械参数设计进行优化[17-18]。另外在物料筛分、食品加工机械中,对多组分混合物的筛选以及粘结模型的破碎过程进行仿真,分析工作过程中物料的运动规律,及影响其运动规律的主要因素[19-21]。
目前国内外学者对蒜种鳞芽正头的研究以结构创新居多,对影响鳞芽正头率的主要因素研究较少[22]。本文以苍山大蒜为研究对象,采用离散元技术分析大蒜在双鸭嘴大蒜正头装置内的调头过程,着重研究蒜种运动轨迹及在运动中特定点蒜种姿态的变化,得到影响鳞芽正头率的主要因素,通过室内试验及大田试验验证上述分析的正确性,为大蒜播种机械正头部件的设计优化,提供一种新的研究手段。
1 双鸭嘴式大蒜播种机基本结构
双鸭嘴式大蒜播种机结构如图1所示,由机架、种箱、排种装置、插播装置、圆盘耙、传动系统、压平辊及地轮组成。采用悬挂式结构与拖拉机配套,播种时一次性完成整地、排种、插播、覆土镇压等多道工序。
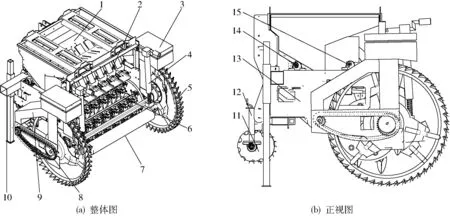
图1 双鸭嘴式大蒜播种机结构图Fig.1 Structure diagrams of garlic planter with two duckbill devices1.种箱 2.排种装置 3.工具箱 4.耕深调节器 5.地轮 6.插播装置 7.压平辊 8.传动系统 9.车轮护罩 10.机架 11.圆盘耙 12.耙深调节器 13.左支撑板 14.种箱转轴轴承座 15.排种器转轴轴承座
播种作业时大蒜播种机在拖拉机的带动下前进,圆盘耙在播种机的最前方将地面整平,并将杂草切割,防止杂草缠绕插播鸭嘴。地轮与地面摩擦输出动力至主轴,再经调速机构将动力分别传递至调向齿轮与插播装置,调向齿轮改变转向后将动力传递至种箱与排种器,如图2(图中i表示传动比)所示。排种器上的取种指夹转动至种箱时打开并夹住一粒大蒜,实现单粒取种;随着排种盘的旋转,单粒蒜种转到接种鸭嘴上方时取种指夹打开,大蒜落入双鸭嘴调头装置中的接种鸭嘴;随后双鸭嘴调头装置中的插播鸭嘴将接种鸭嘴打开,大蒜在重力的作用下落入插播鸭嘴,并在此过程中实现正头,即实现鳞芽向上的种植农艺要求,插播鸭嘴随插播装置转动并将大蒜插进土壤;播种后的地面由压平辊压实,整个种植过程完成。
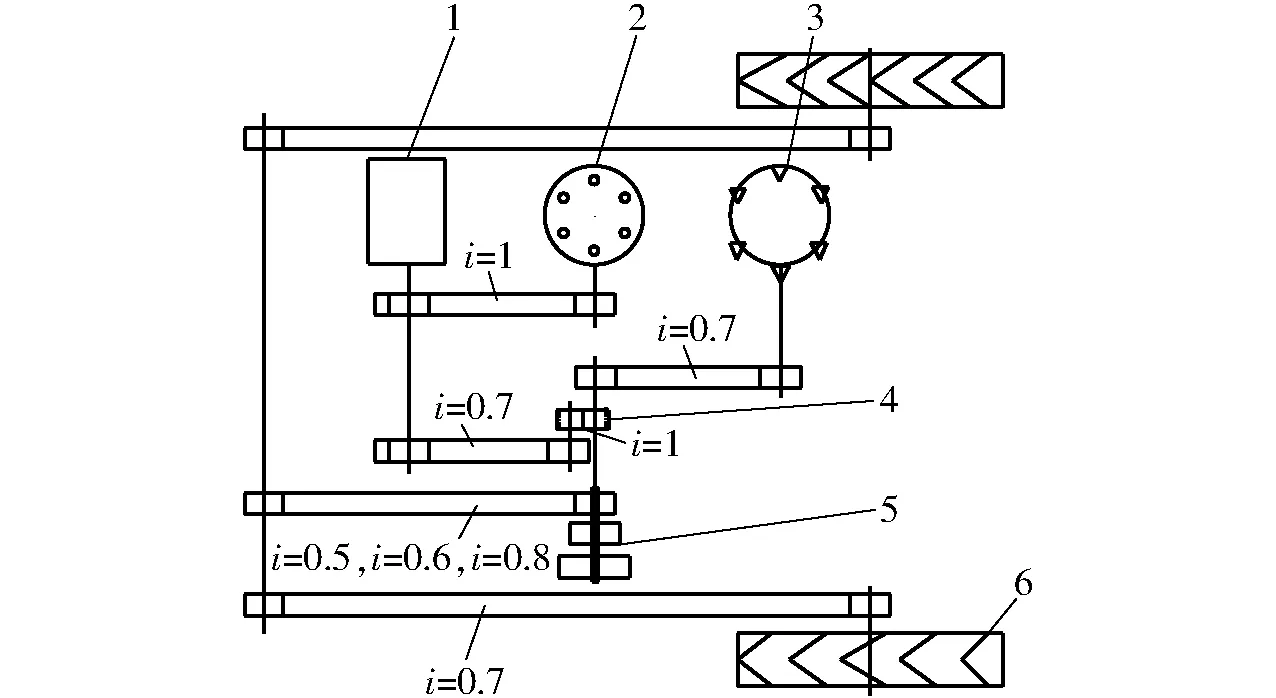
图2 双鸭嘴式大蒜播种机传动原理图Fig.2 Transmission schematic of garlic planter with two duckbill devices1.种箱 2.排种器 3.插播装置 4.调向齿轮 5.调速机构 6.地轮
2 双鸭嘴式正头装置结构与工作原理
2.1 调头装置结构
双鸭嘴式调头装置是播种机的关键部件,该装置能够将大蒜在植入土壤之前将其调至鳞芽向上,从而满足大蒜种植时农艺要求。该调头装置主要由接种鸭嘴与插播鸭嘴组合构成,其结构如图3所示。其中接种鸭嘴包括长接种鸭嘴与短接种鸭嘴,二者各自通过连接轴安装在接种鸭嘴支架的轴孔上,并用复位弹簧将二者闭合。插播鸭嘴包括插播鸭嘴支架、前插播鸭嘴、后插播鸭嘴;前插播鸭嘴与后插播鸭嘴分别与插播支架铰接,并用复位弹簧将二者闭合。
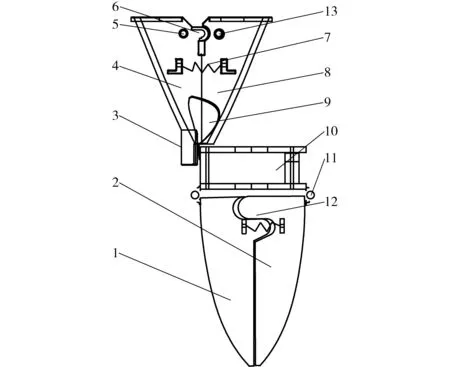
图3 调头装置结构图Fig.3 Structure diagram of adjusting mechanism1.前插播鸭嘴 2.后插播鸭嘴 3.驱动挡块 4.长接种鸭嘴 5、13.连接轴 6.接种鸭嘴驱动臂 7.复位弹簧 8.短接种鸭嘴 9.大蒜 10.插播鸭嘴支架 11.轴销 12.插播鸭嘴驱动臂
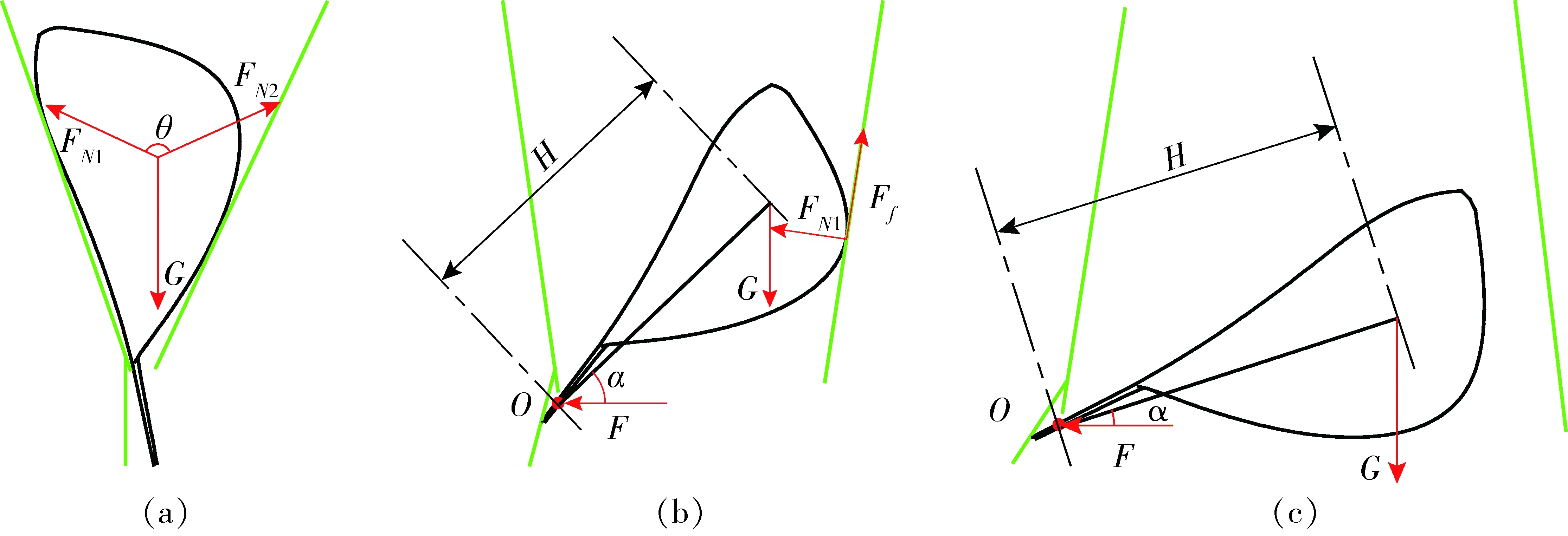
图4 蒜种运动过程受力图Fig.4 Force analysis diagrams of garlic in process of movement
播种作业时,插播鸭嘴组合随转盘做圆周运动,插播鸭嘴支架与长接种鸭嘴的驱动挡块碰撞并推动长接种鸭嘴运动,此时在接种鸭嘴驱动臂的作用下,短接种鸭嘴以轴销为中心反方向运动,鸭嘴打开;此时,接种鸭嘴内的大蒜,若其鳞芽朝下,如图3所示,鳞芽就被挡块与插播鸭嘴支架夹住,由于大蒜重心在上部,大蒜会以鳞芽为中心旋转180°左右,接着落入插播鸭嘴组合内,完成正头;相反,若大蒜鳞芽向上,由于重心在下,大蒜会落入插播鸭嘴后,鳞芽依旧朝上。
2.2 调头装置工作原理
下面对双鸭嘴式调头装置调头过程中关键时刻进行力学分析。对于大蒜落入接种鸭嘴后鳞芽向下时,大蒜在调头装置中的调头过程分为3种状态,如图4所示。
状态1为蒜种在接种鸭嘴中静止,如图4a所示,此时蒜种受力平衡,即
(1)
(2)
式中FN1——短接种鸭嘴对大蒜支持力,N
FN2——长接种鸭嘴对大蒜支持力,N
θ——支持力FN1与FN2之间的夹角,(°)
G——大蒜重力,N
状态2时,蒜种处于缓慢旋转状态,接种鸭嘴在插播鸭嘴推动力的作用下打开,如图4b所示,蒜种鳞芽尖部受长接种鸭嘴的驱动挡块与插播鸭嘴的推力F夹持,由于鳞芽尖部具有一定的韧性,可认为蒜种绕鳞芽旋转, 即绕蒜种矩心O点转动,蒜种受到自身重力G向下的转矩和短接种鸭嘴的支持力FN1、摩擦力Ff的阻力矩。由图4b可计算出蒜种绕O点转动的力矩
MO=GHcosα-FN1L1-FfL2
(3)
式中Ff——蒜种与短接种鸭嘴之间摩擦力
L1——支持力FN1的力臂,mm
L2——摩擦力Ff的力臂,mm
H——蒜种重心到鳞芽尖部的距离,mm
α——蒜种重心与O点的连线和水平面夹角,(°)
状态3时,蒜种处于快速旋转状态,短接种鸭嘴与蒜种脱离,阻力矩消失,且角α越来越小,力臂越来越大,蒜种在自身重力的作用下快速旋转,如图4c所示。当蒜种脱离接种鸭嘴后在惯性的作用下继续旋转,完成调头。
MO=GHcosα
(4)
由式(3)、(4)可知,重心到鳞芽的距离H越大其转矩MO越大,蒜种调头效果越好,即蒜种重心越靠近蒜种底部,其调头效果越好。
3 调头过程EDEM虚拟仿真与分析
双鸭嘴式调头装置在调头的工作过程中与大蒜发生多次干涉碰撞,大蒜的运动较为复杂,无法完全通过试验或者理论计算来分析大蒜的运动过程,研究其调头机理。本研究选用离散元数值模拟仿真软件(EDEM)研究大蒜调头过程的动力学规律。
3.1 双鸭嘴式调头装置最大作业速度计算
大蒜插播效率由调头装置的工作效率决定,而调头装置的工作效率由插播装置的转动速度决定。大蒜从接种鸭嘴到插播鸭嘴组合的运动过程为:从排种器落入接种鸭嘴,经过反弹后稳定,当接种鸭嘴被插播鸭嘴组合打开后,大蒜做自由落体运动,其运动过程如图5所示。
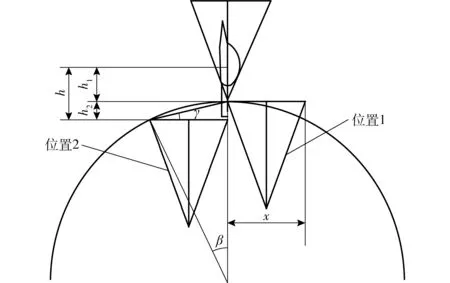
图5 大蒜正头运动过程图Fig.5 Moving process of adjusting garlic upwards
插播鸭嘴在t1时刻从位置1逆时针旋转,经过时间Δt后到达位置2,此时,时间为t2,旋转角度为β;在此过程中大蒜从接种鸭嘴落入到插播鸭嘴中,忽略机具与大蒜的整体移动,若要满足大蒜落入插播鸭嘴,则接种鸭嘴水平方向上的位移必须小于x。
(5)
(6)
h=h1+h2
(7)
(8)
β=ωΔt
(9)
(10)
式中r——圆盘半径,mm
ω——圆盘角速度,rad/s
由式(5)~(10)可解得
即为插播装置最大角速度。
3.2 接种鸭嘴关键部位设计
大蒜调头机构中最重要的是接种鸭嘴的设计,调头工作的正常进行必须满足以下条件:①保证大蒜鳞芽竖直向上或向下。②当鳞芽向下时,保证鳞芽能够伸出接种鸭嘴。③鳞芽向上时,当插播支架与长接种鸭嘴驱动挡块相接触时,为保证大蒜能够竖直下落,插播支架不得与大蒜根部相接触。以上功能主要通过设计一对锥形仿形接种鸭嘴实现,如图6所示。
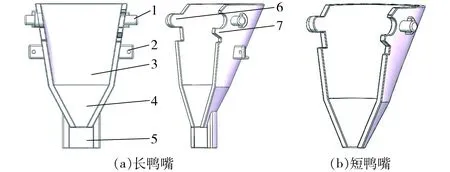
图6 接种鸭嘴结构图Fig.6 Structure diagrams of duckbill device for catching garlics1.转轴 2.弹簧座 3.扩容区 4.仿形区 5.驱动挡块 6.驱动臂 7.驱动臂挡块
长接种鸭嘴分为转轴、弹簧座、扩容区、仿形区、驱动挡块、驱动臂、驱动臂挡块。长接种鸭嘴去除驱动挡块后即为短接种鸭嘴。短接种鸭嘴与长接种鸭嘴对称分布,共同组成一个锥形接种鸭嘴。
每对接种鸭嘴的仿形区以图7中A型所示结构为基础,并设计B型和C型两种不同的形状结构以优化锥形鸭嘴,从而更好地满足条件②、③。A型为圆锥形基准鸭嘴,B型鸭嘴是将开口角度随高度增加不断增大,C型是仿照大蒜形状设计。
文字是承载和传播文化的符号,是人类话语生产和精神生产的工具和产品。透过每一个字及其所组成的词语的形声义的演变以及人们对这种演变所做的阐释,我们可以了解文字所承载和传播的文化的具体内涵、独特特征、变化发展。因此,我们选取了一些中华文化关键字,对其进行文字和词语的诠释,以期从侧面理解和阐释中华文化。本篇论文以“中”字为例进行相关论述。
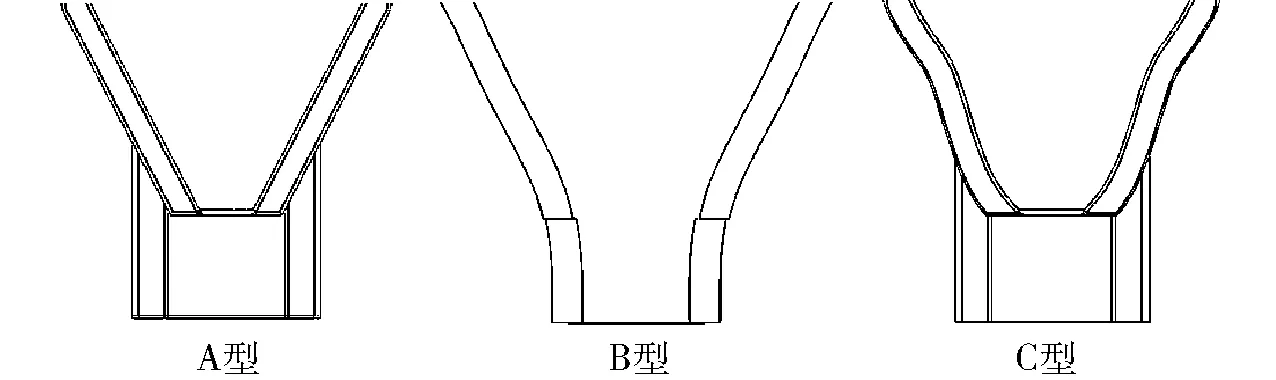
图7 不同类型的接种鸭嘴仿形区结构图Fig.7 Profiling structure diagrams of different kinds of duckbill devices for catching garlics
3.3 大蒜颗粒EDEM仿真模型的建立
本研究选用山东省苍山大蒜,由于大蒜外形的不规则特征,首先要对大蒜进行分类以便对大蒜建模仿真。根据对大蒜种子调研分析,对500粒种子样本进行测量,按照图8所示的大蒜长、宽、厚以及鳞芽的尺寸规格,将大蒜分为3个等级,并计算了各类大蒜在样本中所占比例,结果见表1。
图8 大蒜结构图Fig.8 Structure diagram of garlic
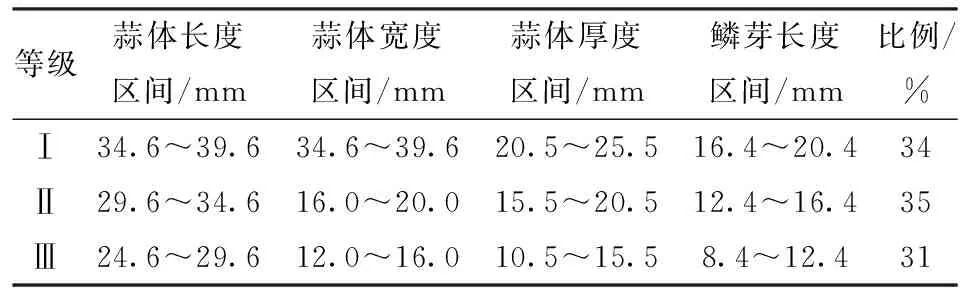
等级蒜体长度区间/mm蒜体宽度区间/mm蒜体厚度区间/mm鳞芽长度区间/mm比例/%Ⅰ34.6~39.634.6~39.620.5~25.516.4~20.434Ⅱ29.6~34.616.0~20.015.5~20.512.4~16.435Ⅲ24.6~29.612.0~16.010.5~15.58.4~12.431
取每个等级中长、宽、厚的平均值在三维建模软件中建立大蒜的三维模型,共建立3级大蒜模型,并将3个模型转换为x_t格式导入EDEM软件中,用球形颗粒填充。图9为各类型大蒜实物图与EDEM软件仿真模型对比图。
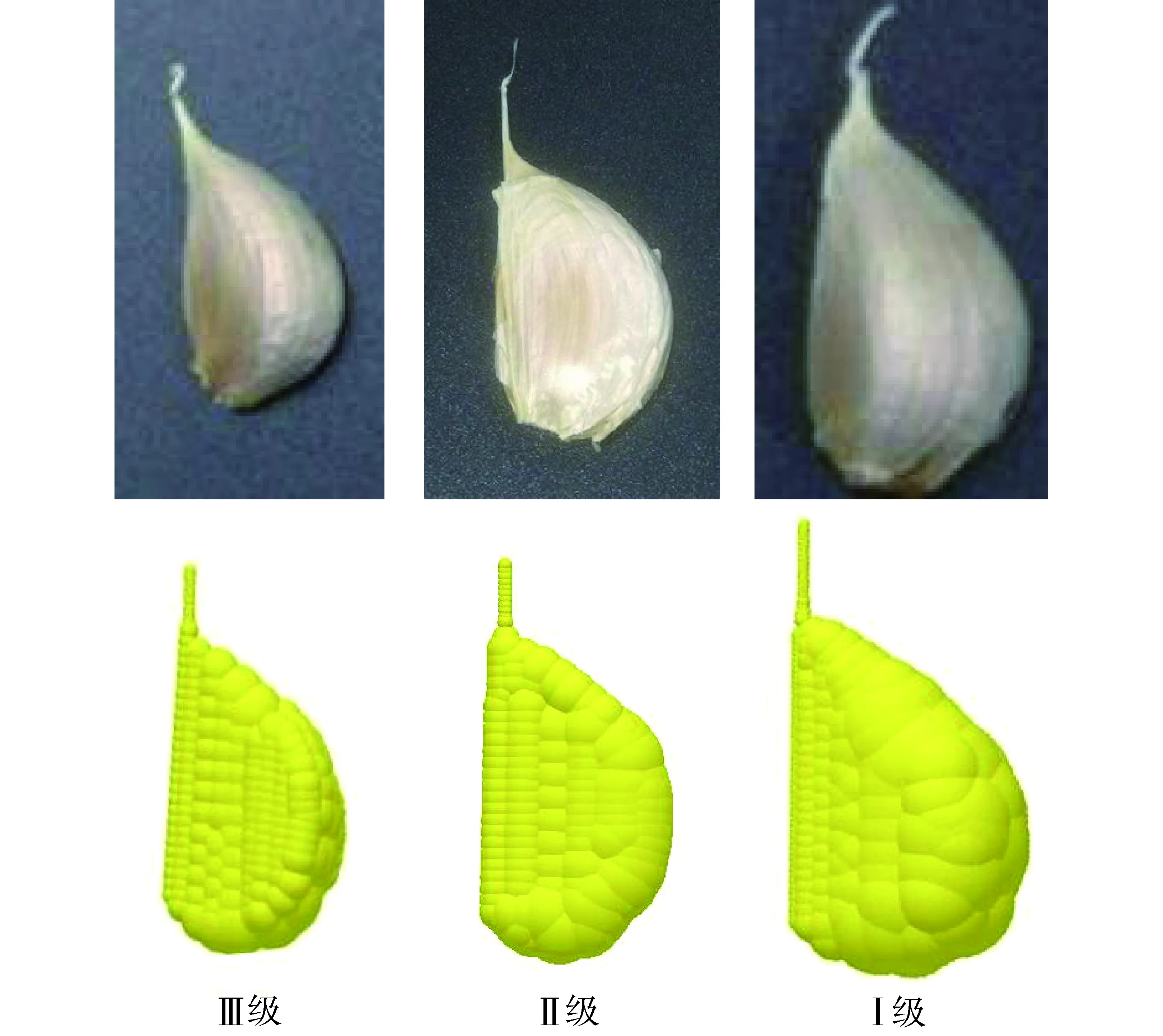
图9 大蒜实物与EDEM模型Fig.9 Objects of garlic and models by EDEM
应用三维建模软件对大蒜调头机构进行实体建模,为了减少EDEM仿真模拟时间,将与大蒜运动过程中不发生接触的部件去除,将调头结构简化为接种支架、接种鸭嘴、插播支架、插播鸭嘴、行星齿轮托架、中间传动轴、3根六角传动轴等。将建立好的模型转换为x_t格式导入EDEM软件中,如图10所示。
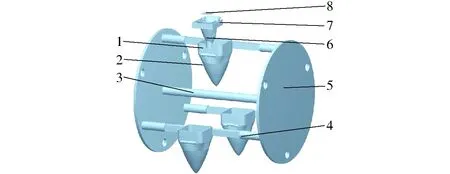
图10 鸭嘴式大蒜调头机构仿真模型Fig.10 Simulation model of adjusting mechanism1.插播支架 2.插播鸭嘴 3.中间传动轴 4.六角传动轴 5.行星齿轮托架 6.接种鸭嘴 7.接种支架 8.颗粒工厂
根据调头机构所用材料,将接种鸭嘴、接种支架、插播鸭嘴、插播支架设置为有机玻璃,将中间传动轴、六角传动轴、行星齿轮支架统一设置为45号钢。由于调头机构调头时是单粒蒜种,不存在大蒜颗粒间接触,因此大蒜间接触参数在此处略去。大蒜颗粒、有机玻璃的物性参数及接触参数如表2所示。
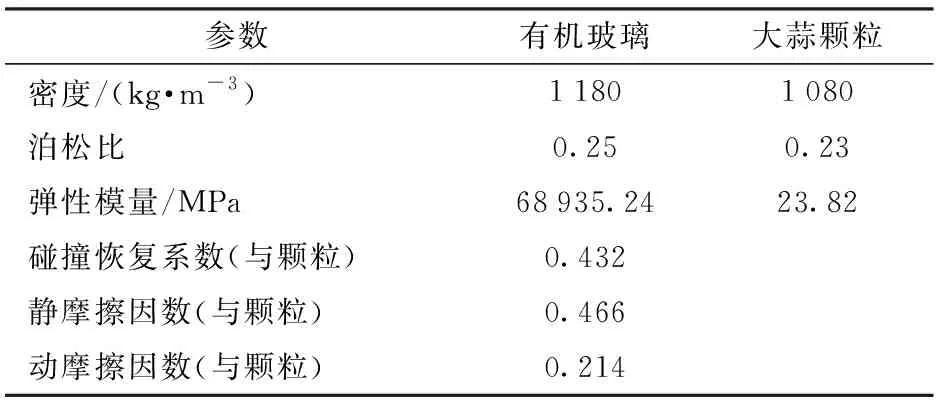
表2 大蒜调头仿真参数Tab.2 Simulation parameters of adjusting garlics upwards
3.4 大蒜颗粒EDEM仿真
根据双鸭嘴式调头装置最大作业速度计算公式计算后,设置行星齿轮盘工作转速分别为10、15、20、25 r/min,共12组虚拟仿真,颗粒工厂设置在接种鸭嘴的上方,每次生成一粒大蒜,生成速度分别为1、1.5、2、2.5粒/s,每组鸭嘴不同速度共下落300粒大蒜,每种类型的大蒜按照表1所示比例,分别设置:Ⅰ级102粒、Ⅱ级105粒、Ⅲ级93粒。设置大蒜下落初速度为200 mm/s,方向向下,角速度为0 rad/s;大蒜鳞芽朝向设置为随机,时间步长为5.2×10-6s。图11为大蒜仿真过程图,其中图11a、11b、11c为大蒜鳞芽竖直向上时仿真过程,图11d、11e、11f为大蒜鳞芽竖直向下时仿真过程,该过程与上述原理分析一致。
图11 鸭嘴式大蒜调头机构仿真过程Fig.11 Simulation process of adjusting mechanism
图12 大蒜轨迹图Fig.12 Movement trajectory of garlic
如图12所示,以不同状态下的大蒜为研究对象对大蒜的运动进行分析,设置其以流线型显示,图中彩色流线表示被跟踪大蒜颗粒质心的运动轨迹。图12a为大蒜鳞芽向上时,大蒜从颗粒工厂竖直下落至接种鸭嘴与接种鸭嘴发生碰撞后改变运动轨迹,随后落至接种鸭嘴底端并经过短暂的轻微振荡后静止,在大蒜振荡后插播鸭嘴支架将接种鸭嘴打开,大蒜下落至插播鸭嘴,图中箭头方向为大蒜运动方向。图12b为大蒜下落至接种鸭嘴底端后鳞芽朝下,大蒜质心以鳞芽为中心旋转约180°后落入插播鸭嘴,可观察到接种鸭嘴底部有一半圆形轨迹,图中箭头方向为大蒜运动方向。图12c为鳞芽朝下时大蒜调头失败,大蒜在接种鸭嘴底部稳定后,在插播鸭嘴支架的碰撞下向上运动,接着自由下落,图中箭头方向为大蒜运动方向。图12d为大蒜在接种鸭嘴底部绕鳞芽转动的轨迹放大图,箭头方向代表大蒜质心运动到该位置时鳞芽朝向。
3.5 仿真结果与分析
在仿真过程中发现4个影响大蒜鳞芽正头率的因素:接种鸭嘴形状;大蒜重心位置;插播装置转动速度;二次弹跳。
3.5.1EDEM仿真受力校核
在EDEM中对仿真过程中3种状态所受力的大小进行测量,并将EDEM中所测数据(表3),代入公式(1)~(4)中。由表3可知,将重力G与支持力FN1、支持力FN2代入公式(1)、(2)后,公式两边相等;式(3)代入数据后MO=1.323 N·mm,大于0,蒜种处于旋转状态;公式(4)代入数据得MO=2.207 N·mm,力矩大于0,且大于状态2时的力矩;从力学的角度上说明了用EDEM仿真是可信的。
表3 蒜种受力仿真结果Tab.3 Value of force simulations of garlics
3.5.2总体样本分析
图13为300粒大蒜在插播转盘工作速度分别为10、15、20、25 r/min时,图7中A、B、C型接种鸭嘴的鳞芽正头率变化曲线。

图13 3种接种鸭嘴总体鳞芽正头率变化曲线Fig.13 Variation curves of rate of garlic bulbil with upward direction for three kinds of mechanisms
由图13可知,随速度从10 r/min到25 r/min不断增加,A、B、C型接种鸭嘴的鳞芽正头率不断降低,在10~15 r/min之间3种接种鸭嘴的鳞芽正头率下降缓慢,在20~25 r/min之间下降迅速,说明转速影响大蒜鳞芽正头率。在调头装置相同转速下,C型接种鸭嘴的鳞芽正头率最高,B型接种鸭嘴的鳞芽正头率最低,说明接种鸭嘴的形状是影响大蒜鳞芽正头率的因素之一。
3.5.3对不同级别蒜种样本分析
图14 3种接种鸭嘴鳞芽正头率变化曲线Fig.14 Variation curves of three kinds of duckbill devices adjusting garlics upwards respectively
图14为Ⅰ、Ⅱ、Ⅲ 3种级别的大蒜以及总样本的鳞芽正头率随工作转速的变化曲线。由图14可知,Ⅰ、Ⅲ两种级别的大蒜在同种接种鸭嘴中的鳞芽正头率相近,Ⅱ级大蒜鳞芽正头率较低,由表1可知,Ⅱ级大蒜的尺寸在Ⅰ、Ⅲ两种类型之间,说明在同种接种鸭嘴中大蒜的尺寸与鳞芽正头率无关。对比图9中3种大蒜外形发现Ⅱ级大蒜的中心靠近鳞芽,Ⅰ、Ⅲ两种级别的大蒜中心远离鳞芽,可知重心位置是影响大蒜鳞芽正头率的一个因素。
3.5.4对大蒜二次弹跳现象分析
根据图14数据走向可知20~25 r/min之间鳞芽正头率下降较快,对各个大蒜的运动轨迹进行分析发现,速度为20 r/min与25 r/min时存在大蒜二次反弹而导致大蒜调头失败,如图12c所示。对A、B、C 3种接种鸭嘴发生二次弹跳而导致大蒜调头失败的比率进行统计,如图15所示,B型鸭嘴发生二次反弹的比率最高,C型鸭嘴最低;在速度20 r/min之前C型接种鸭嘴不会因二次弹跳而导致调头失败,可以确定二次弹跳对C型接种鸭嘴影响较小。
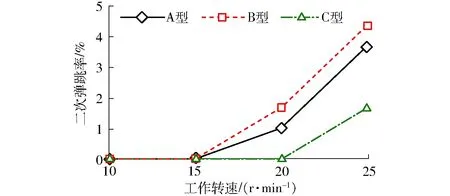
图15 3种接种鸭嘴二次弹跳率变化曲线Fig.15 Variation curves of the secondary bounce rate for three kinds of mechanisms
3.5.5大蒜正头率影响因素分析
由以上分析可知:①影响鳞芽正头率的主要因素为插播鸭嘴工作转速、蒜种重心位置、鸭嘴类型,而蒜种大小对鳞芽正头率基本无影响。其中C型接种鸭嘴鳞芽正头率最高,且工作转速越高,蒜种重心位置越靠近鳞芽,正头率越低。②工作转速提高引起的蒜种二次弹跳会进一步降低正头率,且转速越高二次弹跳率越高,正头率越低。在插播鸭嘴工作速度低于20 r/min时,不会出现蒜种的二次弹跳现象,当插播鸭嘴工作转速大于20 r/min,开始出现二次弹跳现象。
4 试验验证
4.1 室内试验
试制了试验样机,在室内进行播种试验,如图16所示,对3种接种鸭嘴在10、15、20、25 r/min的4种不同转速下进行试验,样机对应运动速度分别为0.72、1.08、1.44、1.8 km/h,每种试验采集300粒蒜种,重复3次,取平均值。采用高速摄像机提取了播种过程蒜种运动过程,并记录因二次弹跳导致调头失败的大蒜数目。
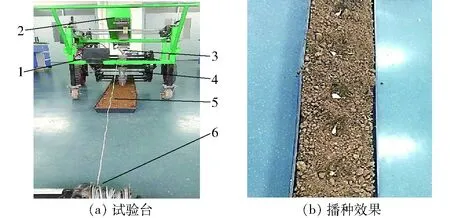
图16 调头装置试验台与播种效果Fig.16 Test bed of adjusting mechanism and seeding effect1.移动电源 2.排种装置 3.接种鸭嘴 4.插播装置 5.土槽 6.绞盘
4.1.1大蒜调头过程
图17为用高速摄像机记录的大蒜调头运动过程,其中图17a、17b、17c为大蒜鳞芽竖直向下时工作过程,图17d、17e、17f为大蒜鳞芽竖直向上时工作过程。为便于观察将大蒜鳞芽染成红色,图17中所示的试验调头过程与图12中仿真调头过程一致,说明离散元技术可以很好地模拟此过程。

图17 大蒜调头工作过程Fig.17 Process of mechanism adjusting garlic
4.1.2重心位置分析
为探究重心位置对大蒜调头的影响,随机选取300粒大蒜对其进行水浴试验,即将蒜种放进盐水中,鳞芽向下者其重心位置靠近鳞芽。对300粒大蒜统计,重心靠近蒜种鳞芽的数量为16粒,占总体样本的5.3%。挑选出100粒重心靠近鳞芽的大蒜和100粒重心靠近蒜种底部的大蒜,选用C型鸭嘴在插播鸭嘴转速为20 r/min时对其做单因素试验,重复3次,取其平均值。试验结果为,重心靠近鳞芽的大蒜调头率为93.33%,重心靠近蒜种底部的大蒜调头率为95.67%,两者相差2.34个百分点,但因蒜种重心位置靠近鳞芽的大蒜在总体样本中所占比例为5.3%,所以重心位置对总体蒜种调头率影响不显著。
4.1.3室内试验分析
图18为3种接种鸭嘴仿真与试验鳞芽正头率随调头装置工作转速变化的曲线。大蒜鳞芽正头率随装置工作转速的增加而减小,且下降速度越来越大,试验数据与仿真数据变化趋势一致,最大误差为2.66%,证明了用EDEM软件对大蒜调头仿真的可行性。
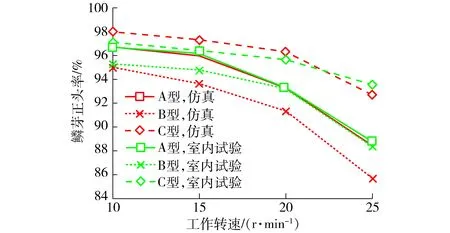
图18 3种接种鸭嘴仿真与室内试验正头率变化曲线Fig.18 Simulation and laboratory experiment variation curves of garlic upwards by three kinds of mechanisms
为探究工作转速与接种鸭嘴类型对大蒜正头率影响的显著性,以及确定二者最优组合,对上述室内试验数据进行双因素试验的极差与方差分析。以工作速度与鸭嘴类型两因素进行分析,对插播装置的工作转速选取正头率较高的10、15、20 r/min进行分析,接种鸭嘴的3水平分别为A、B、C型接种鸭嘴,其试验因素水平如表4所示。
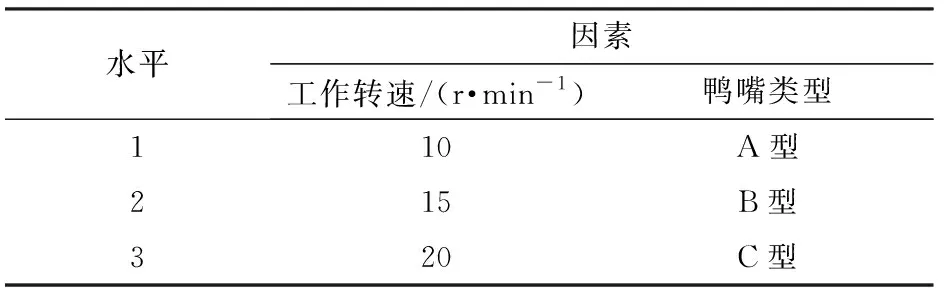
表4 试验因素水平Tab.4 Factors and levels of experiments
试验方案及结果见表5,A、B为工作转速和鸭嘴类型的水平值,由表可知,因素A的极差R为6.89,因素B的极差R为5.90,即RA>RB,因此,对鳞芽正头率影响程度由大到小为:工作速度、鸭嘴类型;以鳞芽正头率最高为最优指标,最优的因素水平组合为:工作转速为10 r/min,鸭嘴类型为C型,即A1B3。
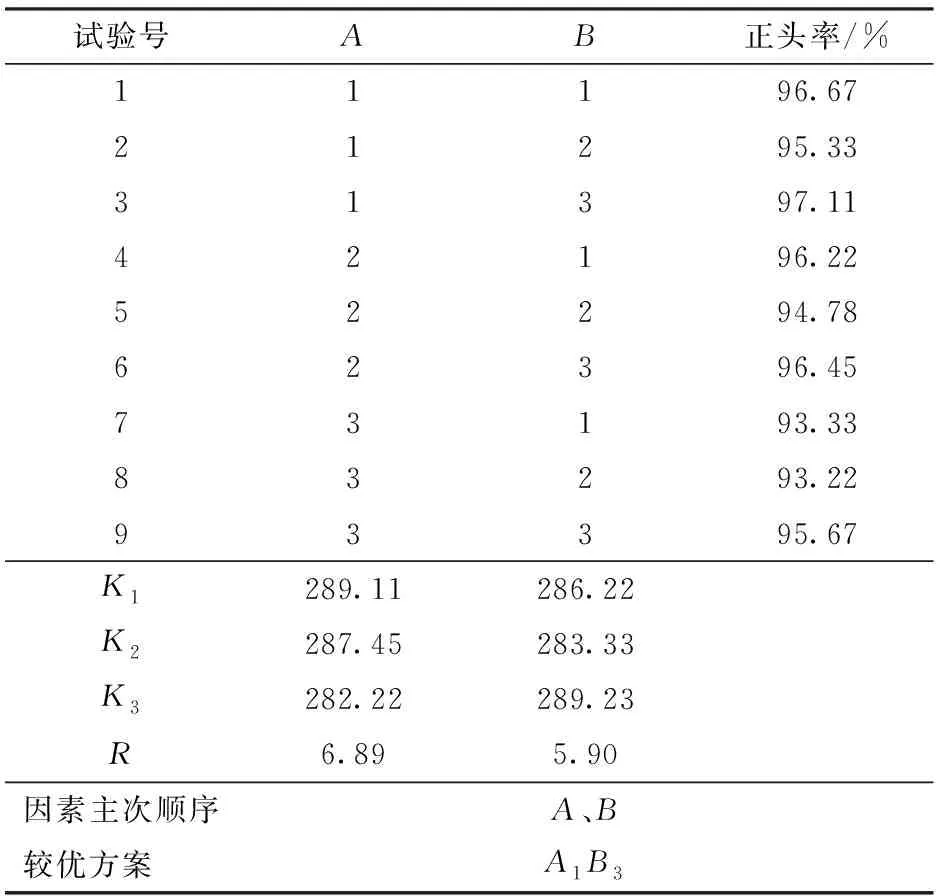
表5 试验方案及结果Tab.5 Design and results of experiment
利用方差分析法对试验结果进行分析,结果见表6,由表可知,因素A的P值为0.019(小于0.05),因素B的P值为0.037(小于0.05),因此工作速度与鸭嘴类型对鳞芽正头率均有显著影响。另外,从上述数据中可知,在A、B、C 3种鸭嘴中,选用C型鸭嘴时,调头率最高;确定选用C型鸭嘴,当工作速度分别为10、15、20 r/min时,正头率分别为97.11%、96.45%、95.67%,可满足农艺要求;由单因素试验结果(图18)可知,选用C型鸭嘴、工作速度为25 r/min时,正头率为93.55%,正头率相对较低;因此,为提高工作效率,同时满足农艺要求,最优组合应选为:工作转速为20 r/min,鸭嘴类型为C型,即A3B3。
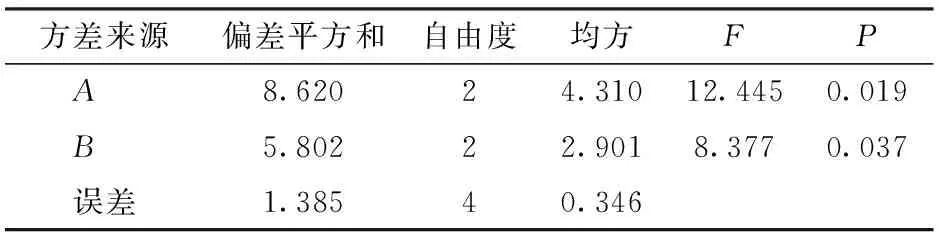
表6 正头率方差分析Tab.6 ANOVA of rate of garlics upwards
4.1.4二次弹跳分析
图19为仿真与室内试验时大蒜发生二次弹跳的比率。二次弹跳率随调头装置工作速度的增加而增加,试验数据与仿真数据变化趋势一致。
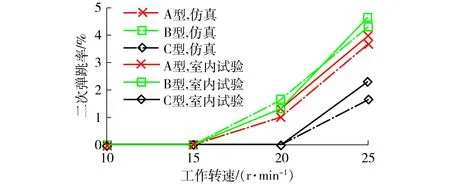
图19 3种接种鸭嘴仿真与室内试验二次弹跳率变化曲线Fig.19 Variation curves of the secondary bounce rates of garlics by simulation and laboratory experiment for three kinds of mechanisms
4.2 田间试验
为进一步确定试验效果,对室内试验中调头率较高的C型接种鸭嘴进行田间试验。于2018年3月在山东省泰安市山东农业大学蔬菜试验基地进行了试验,土壤类型为壤土,面积约0.5 hm2,对地块进行旋耕处理。选用本团队试制的大田样机,配套动力为轮式拖拉机,采用三点悬挂的挂接方式牵引播种机,如图20所示。拖拉机作业速度分别为0.72、1.08、1.44、1.8 km/h,以对应插播装置工作速度10、15、20、25 r/min。每种作业速度下采集蒜种样本300粒,统计C型接种鸭嘴在工作转速为10、15、20、25 r/min时,蒜种正头率分别为95.67%、95.33%、
93.67%、89.33%,可知C型接种鸭嘴的正头率随工作转速的增大而降低,与仿真和室内试验变化趋势一致。田间试验正头率低于室内试验与仿真,最大误差为5%,原因可能是田间工作时地势复杂,且插播鸭嘴与地面接触时蒜种会与土壤发生干涉,影响正头率。在预试验中,B型接种鸭嘴在3种接种鸭嘴中正头率最低,在10 r/min的工况下进行田间试验,鳞芽正头率最高,为91%,C型鸭嘴与B型鸭嘴相比提高了4.67个百分点,说明鸭嘴优化是可行的。

图20 播种机作业现场Fig.20 Operation diagram of seeder
5 结论
(1)运用离散元方法建立了双鸭嘴式大蒜正头机构播种动力学模型,分析了蒜种在3种不同类型正头机构中的运动规律并进行了试验,仿真结果与试验基本一致,试验正头率与仿真正头率误差在5%以内,证明了离散元方法分析蒜种运动规律是可行的。
(2)田间试验结果显示,选用C型鸭嘴、作业速度在0.72~1.8 km/h之间时,大蒜鳞芽正头率为89.33%~95.67%,相比A、B型接种鸭嘴,C型接种鸭嘴正头率较高,且最为稳定。
猜你喜欢
Asian Herpetological Research(2023年4期)2024-01-02 06:49:24
中国野生植物资源(2023年9期)2023-10-20 09:11:32
河北农机(2021年11期)2021-11-29 13:16:20
农业工程学报(2021年14期)2021-10-12 10:52:36
卫星电视与宽带多媒体(2021年5期)2021-05-27 12:58:03
农机化研究(2020年4期)2020-10-19 07:01:52
文萃报·周五版(2020年24期)2020-06-22 13:02:38
孩子·小学版(2019年11期)2019-09-10 09:33:39
江苏农业学报(2018年6期)2019-01-04 01:18:58
农民科技培训(2016年3期)2016-03-16 13:45:59
