
双离合混合动力汽车传动系统的设计及仿真分析
2016-12-08 06:18:40刘伟
汽车实用技术 2016年11期
刘 伟
(重庆车辆检测研究院有限公司,重庆 401122)
双离合混合动力汽车传动系统的设计及仿真分析
刘 伟
(重庆车辆检测研究院有限公司,重庆 401122)
文章提出了双离合器并联混合动力系统,即在原有的并联混合动力系统基础上,安装了2个离合器,同时对动力系统进行了关键部件的选型计算,采用了逻辑门限控制策略,并在ADVISOR2002环境下建立了传动系统的模型,在仿真平台上对此模型进行了仿真分析。
混合动力汽车;传动系统;双离合器
10.16638/j.cnki.1671-7988.2016.11.017
CLC NO.: U463.2 Document Code: A Article ID: 1671-7988(2016)11-46-04
本文以DC7130为原型车,采用双离合器传动系统对其传动系统进行改造和重新设计。动力系统关键部件参数设计的原则是在满足整车动力性的前提下尽量提高燃油经济性。
1、混合动力电动汽车分类
混合动力传动系统有3种布置方式:
(1)串联式混合动力传动系统(图1)
在这种系统中,发动机驱动发电机产生电能,电能用于驱动电动机并借此转动车轮。这种系统使用一个较小的发动机在效率最高的转速范围内工作,因此,能够最大限度地改善燃油经济性和减少排放。
(2)并联式混合动力传动系统(图2)
在这种系统中发动机和电动机既可联合驱动车轮,又可各自单独驱动车轮,并且允许发动机在驱动车轮的同时带动发电机给蓄电池充电。

图1 串联式混合动力传动系统
(3)混联式混合动力传动系统(图3)
其布置形式包含串联式和并联式的特点,即功率流既可像串联式流动,又可像并联式流动。它的动力系统包括发动机、发电机和电动机。根据助力装置不同,又可分为发动机为主和电机为主两种。以发动机为主的形式中,发动机作为主动力源,电机为辅助动力源,Nissan Tino HEV属于这种情况。以电机为主的形式中,发动机作为辅助动力源,电机为主动力源,Toyota Pruis HEV就属于这种情况。该结构的优点是控制灵活方便,其缺点是结构相对复杂。

图2 并联式混合动力传动系统

图3 混联式混合动力传动系统
2、双离合混合动力传动系统设计
本文在DC7130汽车平台上进行了混合动力系统的设计开发,在传动电机和发动机之间加入一个离合器,改进后的双离合混合动力传动系统如图4所示:
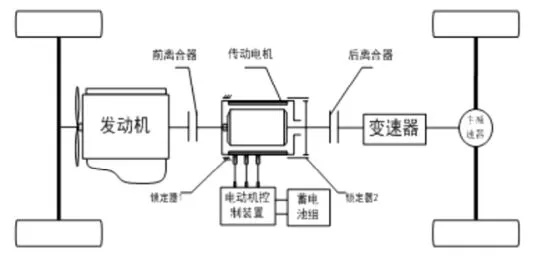
图4 双离合器混合动力汽车传动系统示意图
2.1发动机参数设计
混合动力汽车的动力总成参数确定的基本原则是:发动机功率只需满足在平坦路面上以最高车速行驶的要求,加速和爬坡时所需的峰值功率由电池来补充,电机应补充车辆所需的最大功率。混合动力汽车在高速行驶时(包括城市中高速行驶)优先采用发动机单独驱动,避免以混合驱动或纯电动方式高速行驶时电池的快速冲放电,延长了电池使用寿命。由于电助力型混合动力汽车,发动机只需要提供匀速行驶的功率,而在加速或爬坡时电机可以提供峰值功率,因此发动机相对于传统车可以选得功率小一些,一般根据汽车预期的最高车速来初步选择发动机的最大功率,可用式(1)初步对发动机选型:

其中Pe为发动机的功率,m汽车的整备质量,f滚动阻力系数,cd空气阻力系数,A迎风面积,vmax发动机单独驱动下的最高车速,ηt为系统传动效率,取值0.95。
2.2传动电动机参数设计
电动机的最大功率应从满足混合动力驱动最高车速和整车动力性指标的功率需求出发进行选择。考虑上坡时汽车动力性的要求,计算整车动力性指标功率需求的公式,如公式(2)所示。

式中:α——爬坡角,α=arctan0.12;va——行驶车速。
发动机最大功率Pemax加上电动机最大功率Pmm应大于等于P1和P2中较大的一个,即:Pemax≥max(P1,P2)- Pemax。目前一般选择中高速电机,最高转速一般在6000-15000r/min之间。
2.3蓄电池参数设计
蓄电池作为混合动力汽车的辅助能源直接关系着动力性和经济性,要求蓄电池的容量和功率要和电机性能相匹配。有关电池的配置涉及到电池组的输入、输出功率需求,寿命预计和成本考虑等因素。在合理匹配HEV能源上,电池的充电状态参数SOC(State Of Charge)非常关键,应当让电池经常工作在内阻较低的SOC范围内,同时SOC波动(即△soc 值)不能过于激烈.在SOC工作区内,电池组的峰值放电功率应大于电动机的最大需求功率;在SOC值较低由发动机提供额外充电功率工况下,电池组的峰值充电功率应满足HEV能量管理策略的充电功率要求。混合动力汽车通常采用镍氢电池,具有良好的充放电特性和使用安全性,且具有较高的充电效率,有利于混合动力汽车的再生制动。蓄电池有高功率型和高容量型,本文所述混合动力汽车属于电量保持型,可以选用高功率型,电池主要用来提供峰值功率,因此电池的功率可以按照电机功率初步选择,则电池组总能量C 可以按公式(3)计算:

式中:U0-bat为电池的额定电压V, Pm_max为电机驱动系统的峰值功率其值为15kw,Im_max电机驱动系统的最大工作电流,其值为500A。考虑到电池的单体电压为1.2V,参照有关标准确定电池的电压为144V。
混合动力汽车的电池容量由纯电动续驶里程要求决定,同时电池容量必须满足持续加速和爬坡工况的要求。由于电池荷电状态(SOC)的变化难以直接分析。本文中根据纯电动续驶里程要求,参照以往设计来初步确定电池容量。然后通过仿真检验电池容量的合理性。电池的能量E可以根据混合动力汽车纯电动行使的里程来确定,假设纯电动行使的里程为S,行使速度V,电池SOC 工作范围为SOC_low - SOC_ high,则可以根据式(4)来计算电池的能量。

其中ηbat为电池效率,其值取0.85,ηmot为电机效率,其值取0.9,SOC_low -SOC_ high工作区可取0.3—0.7,S为纯电动续航里程,取值为20km,P 为混合动力车以v=15km/h纯电动匀速行驶时的功率,可由式(5)计算:

由公式4、公式5计算得:E=1.8 kW·h
根据电池供应商提供的电池容量的系列,最终选择了15Ah。本文选用的镍氢电池具体参数如下:

表1 镍氢蓄电池参数
2.4 前后离合器参数设计
在设计离合器时,可以参考常用离合器的尺寸和参数,然后通过计算,选取相应的离合器。
①摩擦片外径D
摩擦片外径是离合器的基本尺寸,它关系到离合器的结构重量和使用寿命。它和离合器所需传递的转矩大小有一定的关系。显然,传递大的转矩,就需要大的尺寸。发动机转矩是重要的参数,当按发动机最大转矩Tmax(N· m)来选定D时,可根据公式(6):

式中D——摩擦片外径,mm
Tmax——发动机最大转矩,N· m
A——和车型及使用情况有关的系数,小轿车A=47;一般载货汽车A=36(单片)或A=50(双片),取A=50。
②摩擦片内径d
摩擦片的内径d不作为一个独立的参数,它和外径D有一定的关系,用比值来反映,定义为:

③摩擦片厚度h
对摩擦片的厚度h,我国已规定了3种规格:3.2 mm,3.5 mm和4 mm。根据离合器摩擦片的尺寸系列,取厚度h =3.2mm。
综上所述,选取摩擦片外径D=160 mm,内径d=110 mm,厚度h=3.2 mm,=0.687。
因为粉末冶金材料和金属陶瓷材料的摩擦因数f较大而且稳定,考虑到制造成本,这里摩擦片材料取铁基粉末冶金材料,摩擦因数为f = 0.4。
因为本文采取的是扭矩耦合的传动电机,因此在电动机和发动机同时驱动时扭矩并不改变,只是转速提高,因此,前后离合器采用同样的参数。
3、双离合混合动力汽车传动系统模型的建立
通过分析仿真软件 ADVISOR建模,对双离合重度混合动力汽车传动系统各主要部件进行建模,分别对发动机、电动机、电池组、前后离合器、变速器以及动力耦合装置建模,最后运用这些子模型搭建整车模型。基于某并联式混合动力汽车仿真模型,建立如图5所示的整车模型。

图5 DC7130混合动力汽车仿真顶层模型
4、双离合混合动力传动系统控制策略设计
双离合器并联式混合动力汽车控制策略的核心是能量管理策略,是混合动力汽车控制领域中研究的重点,也是混合动力汽车开发的关键技术。逻辑门限值控制方法是以整车油耗和排放最佳为控制目标,提出同时限制电池和发动机工作区间的控制策略,通过设定门限值,将发动机控制在高效率区运行,提供要求的转矩;电动机作为载荷调节装置,当需要大力矩输出时电动机参加驱动,当需要小力矩输出时电动机吸收发动机转矩进行发电,并将电池的荷电状态SOC (state of charge)维持在合理的范围内。
(1)在低速时(低于某一最小车速)或当需要的转矩低于发动机优化区域的最小扭矩点时,电动机提供驱动力矩,前离合器断开,发动机关闭;
(2)在需求的力矩大于发动机工作速度内所能提供的最大力矩时,前离合器接合,电动机提供额外矩;
(3)当再生制动时,电动机给电池充电;
(4)当给定速度下,需求的发动机力矩使发动机运行在低效率区时,发动机将关闭,电动机提供需求的力矩;
(5)当电池的SOC值较低时,发动机将提供额外的力矩给电池充电。发动机始终要启动,它除了驱动外,还要发电为蓄电池充电。当需求扭矩与充电扭矩之和大于最小扭矩而小于最大扭矩时,发动机的扭矩等于需求扭矩加充电扭矩。当需求扭矩较小落在最小扭矩线下面时,如果加上充电扭矩依然在最小扭矩下,则发动机的扭矩就取最小扭矩线上的值。逻辑门限控制策略的关键在于按照合理的原则确定各个控制参数。
5、双离合混合动力传动系统的仿真结果及分析
ADVISOR2002是一个图形化面向对象的环境,拥有良好的用户界面GUI(Graphical User Interface),便于用户操作,而且各种输出仿真结果可视化。软件共有三个GUI:车型输入界面、仿真设置界面和结果输出界面。通过这三个界面,用户输入要仿真的车型和部件总成的相关参数,选择试验循环工况,然后进行仿真。
(1)选择传动系的类型:ADVISOR提供了两种方式来定义车辆传动系统的类型。
一种是ADVISOR内部已有的电动车数据文件,用户可以在此基础上修改。一种是ADVISOR内部的传统汽车、纯电动汽车、混合动力汽车等8种类型的传动系统作为模板,用户可以在此基础上定义自己的传动系统。另外用户还可以定义新的传动系统。本文是在INSIGHT模块基础上改进的传动系统,在修改了M文件之后,形成了DC7130的传动系统,并且将该传动系统导出到了ADVISOR界面之中。
(2)设置部件的仿真参数:ADVISOR设计了车辆、发动机、能量存储系统和电动机等多个部件的仿真模型。混合动力轿车的仿真部件包括车辆(Vehicle)、发动机(Fuel Convener)、排气系统(Exhaust After treatment)、蓄电池及其管理系统(Energy storage system)、电机及其控制器(Motor/controller)、变速系统(Transmission)、扭矩偶合器(Torque coupler)、车轮/车桥(Wheel/Axle)、附件(Accessory)和动力控制系统(Power train control)。本文仿真在ADVISOR2002内部保存的本田Insight参数的基础上,将匹配后的参数通过修改M-file方式输入,由于本文研究的双离合混合动力轿车与Insight的主体结构相似,所以该模型以ADVISOR中Insight模型为基础,修改了顶层模块和控制策略模块,同时修改了Insight发动机控制模块和发动机模块的控制参数、离合器、电机参数以及传动系统参数。
(3)设计控制策略:ADVISOR提供了并行电动辅助(Parallel Electrical Assist)、自适应控制策略(Adaptive Control Strategy)等6种控制模板。用户可以直接使用也可以自行设计控制策略。
仿真结果见图6、图7、图8。
5.1基于动力性仿真结果及分析
由图6可知,车速能满足NEDC循环工况对车速要求,即,仿真车辆的实际车速能够很好地跟踪循环工况车速的变化。另外仿真结果显示,混合驱动时,0~100km/h的加速时间为15.5s和最高车速135km/h,均满足混合动力汽车动力性初始设计指标。
5.2基于燃油经济性仿真结果及分析
整车燃油经济性是设计混合动力汽车的最终目的之一,也是检验参数设计是否合理的最重要指标。仿真结果显示100km/h油耗为:5.9L,样车油耗为:7.8 L燃油节省率约24%,对提高燃油经济性具有明显的效果。

图6 NEDC循环工况图
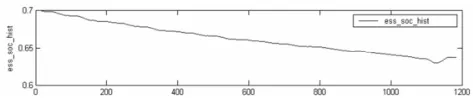
图7 SOC变化

图8 速度
6、总结
本文提出的基于并联混合动力汽车的双离合传动系统在提高动力性和燃油经济性方面效果明显,完全适合并联混合动力汽车的控制要求,而且控制逻辑简单,实现控制策略的硬件不需要很高的费用,经济可靠,实用性很强。
[1]陈清泉,孙逢春,祝嘉光,现代电动汽车技术,北京:北京理工大学出版社,2002,1-25.
[2]C. C. Chen. The State of the Art of Electric and Hybrid Vehieles. In:Proc of the IEEE,Vol.90,No.2,2002.
[3]徐卫国,混合动力汽车的发展状况及前景初探,汽车科技,2001, 6:7-10.
[4]孙逢春,何洪文,混合动力车辆的归类方法研究,北京理工大学学报 2002,22:40-44.
[5]吴彤峰,过磊,李新春.混合动力电动汽车结构与控制策略技术分析[J].广西工学院学报.2005.3.
[6]舒红,秦大同,胡建军.混合动力汽车控制策略研究现状及发展趋势[J].车用发动机.2001.6.
Design and simulation analysis of dual-clutch hybrid electric vehicle transmission system
Liu Wei
(Chongqing Vehicle Test&Research Institute Co., Ltd, Chongqing 401122)
Dual-clutch parallel hybrid system is presented in this paper. Based on the original parallel hybrid system, two clutch are applicated.Then designing the powertrain system of key components ,and using logic threshold control strategy, then establishing the model of the powertrain system by means of the environment of ADVISOR2002. Fianlly simulating and analysising the model throught ADVISOR2002.
Hybrid Electric Vehicle; Power train; Dual-clutch
U463.2 文献表示码:A
1671-7988(2016)11-46-04
刘伟(1978-),男,硕士,从事汽车测试技术与研究。
猜你喜欢
客车技术与研究(2023年6期)2023-12-19 01:21:18
中国造纸(2022年8期)2022-11-24 09:43:38
一重技术(2021年5期)2022-01-18 05:42:12
中国煤层气(2021年5期)2021-03-02 05:53:14
电子制作(2018年10期)2018-08-04 03:24:26
凿岩机械气动工具(2017年3期)2017-11-22 07:21:50
工业设计(2016年11期)2016-04-16 02:48:32
华东理工大学学报(自然科学版)(2015年4期)2015-12-01 04:00:50
客车技术与研究(2014年5期)2014-02-28 08:48:29
山东农机化(2011年2期)2011-08-15 00:42:53
