全电调节无级变速器理论分析及速比控制研究*
2015-09-06 09:41:29张兰春柴华伟杭卫星刘金刚
电机与控制应用 2015年4期
张兰春, 柴华伟, 杭卫星, 刘金刚
(1. 江苏理工学院 汽车与交通工程学院,江苏 常州 213001;2. 湘潭大学 机械工程学院,湖南 湘潭 411105)
全电调节无级变速器理论分析及速比控制研究*
张兰春1,柴华伟1,杭卫星1,刘金刚2
(1. 江苏理工学院 汽车与交通工程学院,江苏 常州213001;2. 湘潭大学 机械工程学院,湖南 湘潭411105)
以提高传动效率为目标,提出了一种采用单电机同时驱动传动带和无级变速器主、从动轮动盘,实现速比调节的新型传动控制方案。详细介绍了该控制执行机构的工作原理,分析了其工作特性。基于运动学分析,建立了速比执行电机转角与无级变速器速比之间的数学模型。基于控制执行机构的动力学分析,针对速比执行电机提出了一种基于比例切换的滑模控制方法。通过建模仿真,验证了设计的控制器能够对无级变速器速比进行较好的跟踪控制。
全电调节; 滑模控制; 电机控制; 无级变速器
0 引 言
无级变速器(Continuously Variable Transmi-ssion, CVT)能够实现传动比的连续改变,从而获得传动系与发动机工况的最佳匹配,能够充分发挥发动机的特性,提高汽车的燃油经济性、动力性、舒适性,并减少污染排放,被认为是汽车的理想传动装置。但是,目前装备CVT的汽车,其燃油经济性虽然比装备液力机械自动变速器有明显改善,但与手动变速器汽车相比,并没有体现出发动机工作在最佳工作点的优势。究其原因,就是CVT的传动效率较低,而传动效率的高低直接决定着CVT能否充分发挥汽车节能减排优势和大规模装备汽车。
本文从提高CVT整体传动效率的角度出发,提出了一种全电调节CVT控制执行方案,取代当前CVT上采用的电子液压控制系统,全面分析了该型控制执行方案的工作原理和特点。基于CVT速比控制要求,对全电调节CVT速比控制执行系统进行了运动学和动力学分析。基于分析得到的CVT速比与控制执行电机转角间的对应关系及系统动力学特性,设计了针对速比执行电机的滑模变结构控制器,并与普通PID控制效果进行了对比分析。
1 全电调节CVT工作原理
全电调节CVT即CVT主、从动带轮的速比调节执行机构均采用电机作为动力源,通过电机及其相应的机械传动机构,调节CVT主、从动带轮动盘的轴向移动,实现CVT速比的实时精确调节。由于主、从动带轮动盘的调节均采用电机作为执行器的电子控制系统,故称其为全电调节无级变速器(Electro Magnetic-CVT, EM-CVT)。依据全电调节思想,本文提出了一种采用单电机实现CVT速比调节的设计方案。
单电机调节EM-CVT结构简图如图1所示[1]。其速比控制调节装置,包括一组直流电机及其控制器、两组齿轮传动机构、两组螺旋丝杠机构、两组弹簧助力机构以及平面轴承和滚针轴承等。在速比调节过程中,直流电机经过齿轮副分别带动主、从动带轮两端的螺旋丝杠机构,进而推动主、从动带轮动盘的轴向直线运动,改变V带与带轮的接触直径,实现CVT无级变速。为了避免CVT传动过程中带轮动盘与螺旋丝杠运动部件的干涉,在两者中间加设了平面轴承。与双电机调节方式[2-3]相比,单电机调节省了1个电机,结构更简单,无须考虑两个电机的协调控制,因而控制也更简单。
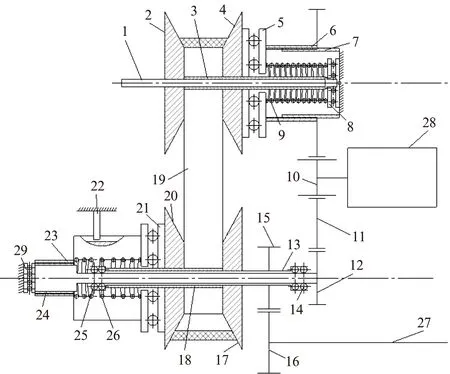
1—CVT输入轴;2—主动带轮定盘;3—套筒;4—主动带轮动盘;5—平面轴承;6—螺旋螺母;7—螺旋丝杆;8—平面轴承;9—助力弹簧;10—主动齿轮;11—中间惰轮;12—从动齿轮;13—CVT输出轴;14—滚针轴承;15—输出主动齿轮;16—输出从动齿轮;17—从动带轮定盘;18—套筒;19—传动V带;20—从动带轮动盘;21—平面轴承;22—导向机构;23—螺旋螺母;24—螺旋丝杆;25—滚针轴承;26—助力弹簧;27—汽车传动轴;28—直流电机;29—平面轴承图1 单电机调节EM-CVT的结构简图
通过单电机调节EM-CVT工作原理分析,可看出其具备以下特性:
(1) 可消除传动带轴向偏移。速比调节时,采用单电机同时调节CVT主、从动带轮动盘的轴向移动,理论上可以实现两动盘位移一致,从而消除传动带的轴向偏移,提高CVT的速比变化范围,并减少由于带偏移造成的磨损,提高带和带轮的使用寿命。
(2) 夹紧力可实现自调节。速比调节过程中,CVT传递转矩所需的夹紧力由其中的弹簧装置提供,保证动力传递的连续性;在特定速比下,随着CVT传递转矩的增大,所需的夹紧力通过执行机构中螺旋丝杠的自锁功能实现,相比液压控制系统,可大大降低能量消耗,提高CVT整体传动效率。
(3) 执行机构大为简化。与液压系统中的执行元件相比,该执行方式结构简单,零部件少,因而成本低、故障少。
2 EM-CVT速比控制运动学建模
采用单电机执行机构对CVT速比进行调节,需要计算出CVT速比与带轮动盘轴向位移的对应关系,进而得到其速比与执行电机转角之间的关系,通过控制电机转角,实现速比的调节控制。
2.1CVT速比与主、从动带轮动盘轴向位移的关系
CVT带轮动盘轴向位移与带轮半径的对应关系在文献[2]中已经进行了推导,并得到了CVT速比与带轮动盘轴向位移的对应关系为
(1)
式中:Dr0——最大速比对应的从动带轮工作半径;
Df0——最大速比对应的主动带轮工作半径;
S1、S2——主、从动带轮动盘相对于最大速比处的轴向位移。
由于单电机速比调节执行机构可以通过CVT主、从动带轮端丝杠机构参数的合理选择,实现带轮动盘的同步移动,保证主、从动带轮动盘在速比调节过程中轴向位移相同,因而利用式(1)得到速比变化率与带轮动盘轴向位移变化率的对应关系:
(2)
2.2执行电机转角与CVT速比关系
采用单电机对CVT速比进行调节时,主、从动带轮动盘的轴向直线运动由电机的旋转运动经螺旋丝杠机构转换后得到,因而在CVT速比与带轮动盘轴向位移关系确定的基础上,根据螺旋丝杠相关参数,即可得到其速比与执行电机转角θ的对应关系:
(3)
式中:iCVT(0)——最大速比;
P——螺旋丝杠螺距;
i1——执行电机与丝杠间减速机构的速比;
α——带轮夹角;
xz、xc——主、从动带轮动盘从最大速比到速比为1时的轴向位移。
根据设计的EM-CVT样机参数,可得到执行电机转角与CVT速比的对应关系如图2所示。
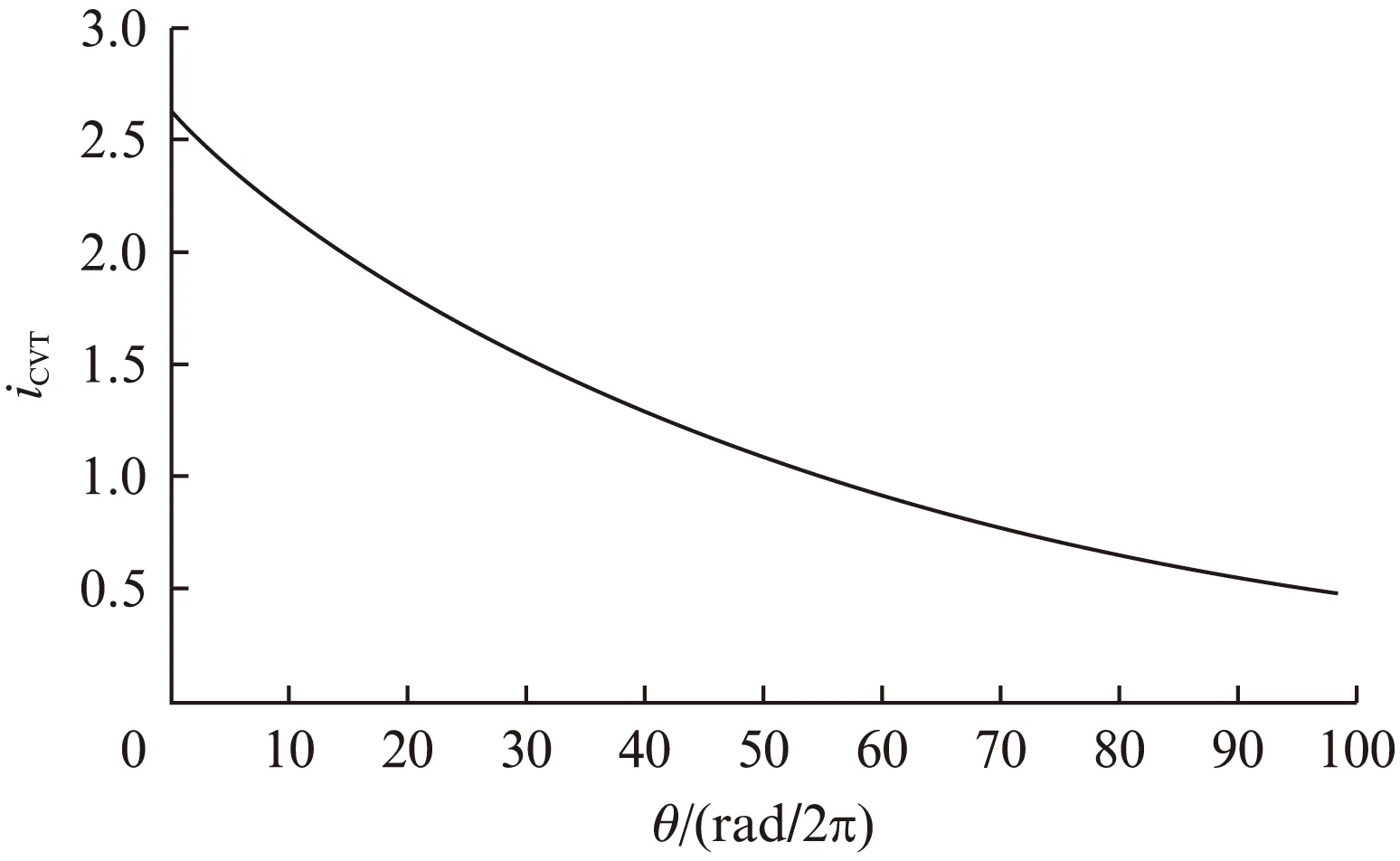
图2 电机转角与CVT速比的对应关系
3 EM-CVT速比控制动力学建模
3.1速比执行机构传动系统动力学模型
由图1所示的单电机EM-CVT工作原理及速比调节过程可得到其速比执行机构的系统动力学方程如下(主动带轮处):
(4)
(5)
(6)
式中:Ft——助力弹簧推力;
Ff——V带传递转矩对带轮动盘的轴向作用力;
K——助力弹簧刚度系数;
Jz——主动带轮处螺旋螺母转动惯量;
ρ——螺旋丝杠摩擦角;
λ、p——螺纹升角、螺纹螺距;
d2——丝杠螺纹中径;
Tmz——执行电机输出转矩。
3.2速比执行电机状态方程
速比执行直流电动机是一个二阶系统,考虑将转子角速度ω和电枢电流I作为状态变量,电枢电压u作为控制输入,负载转矩看作干扰,得到其状态方程[4]:
(7)
式中:Tl——负载转矩;
Km、Ke——转矩系数、反电动势系数;
L、R——电枢电感、电枢电阻;
J——电机及负载转动惯量;
B——粘滞系数。
4 滑模变结构控制器设计
EM-CVT速比控制基本过程如下: 根据汽车实际运行过程中的运动状态以及设计好的CVT调速特性(如最佳经济性或者最佳动力性等),确定EM-CVT的目标速比;根据EM-CVT速比执行机构运动学分析得到速比执行电机转角与EM-CVT速比的对应关系,进而确定速比执行电机的目标转角,通过设计合理的控制算法,对执行电机转角进行控制,最终实现CVT速比控制。
由于滑模变结构控制器应用于直流调速系统中,可以优化系统性能,使系统对负载转矩变化产生相当好的鲁棒性,并具有快速响应性的特点[5-6],能够适应汽车运行过程中工况多变,同时满足CVT速比响应快速、稳定性高等特点和要求,所以本文针对速比执行电机设计了滑模变结构控制器。
4.1切换函数设计
本文选择基于比例切换函数的滑模控制方法。因其控制量大小以不等式形式表示,无需确切知道系统参数,设计方法简单,易于实现。其控制算法为
(8)
(9)
设位置状态方程为

(10)

(11)
则切换函数为

(12)
4.2滑模控制律设计
设计滑模控制律u±(x),满足到达条件,从而在切换平面上形成滑模状态区域。本文设计的控制律为

(13)
一旦切换函数和滑模控制律得到,滑模控制系统就建立起来,根据EM-CVT速比控制过程和要求,设计的执行电机控制框图如图3所示。

θref—执行电机目标转角;θr—实际电机转角;I—电流;Kt—力矩系数;TL—外界干扰;J—折合到电机轴的转动惯量;B—阻尼系数图3 速比执行电机滑模控制框图
5 EM-CVT速比控制仿真研究
根据上述算法,假设汽车运行过程中,EM-CVT传递转矩保持不变,对速比执行电机进行本文设计的滑模控制仿真研究,分EM-CVT速比从最大到最小和最小到最大两种工况进行仿真。图4、图5分别给出了EM-CVT速比从最大到最小调节过程中,电机转角的控制响应曲线和速比控制曲线;图6、图7分别给出了EM-CVT速比从最小到最大调节过程中,电机转角的控制响应曲线和速比控制曲线。
从仿真结果可以看出,设计的滑模控制器,能够根据EM-CVT目标速比的要求,控制电机转角获得稳定的位置输出,响应速度快,无超调,保证了系统的控制精度,可为下一步进行EM-CVT的样机研制和控制系统设计、EM-CVT与发动机以及整车的匹配控制研究提供依据。
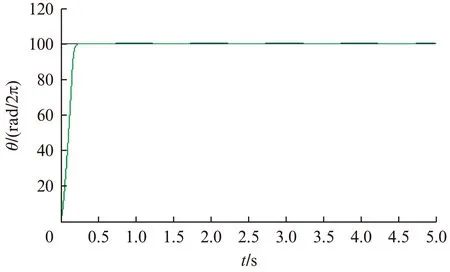
图4 电机转角控制阶跃响应曲线(正转)
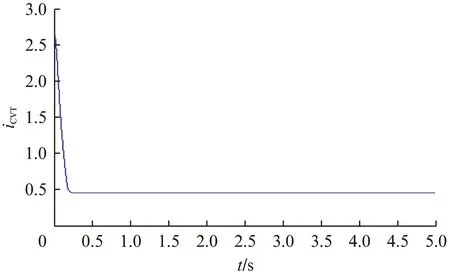
图5 对应EM-CVT速比控制曲线
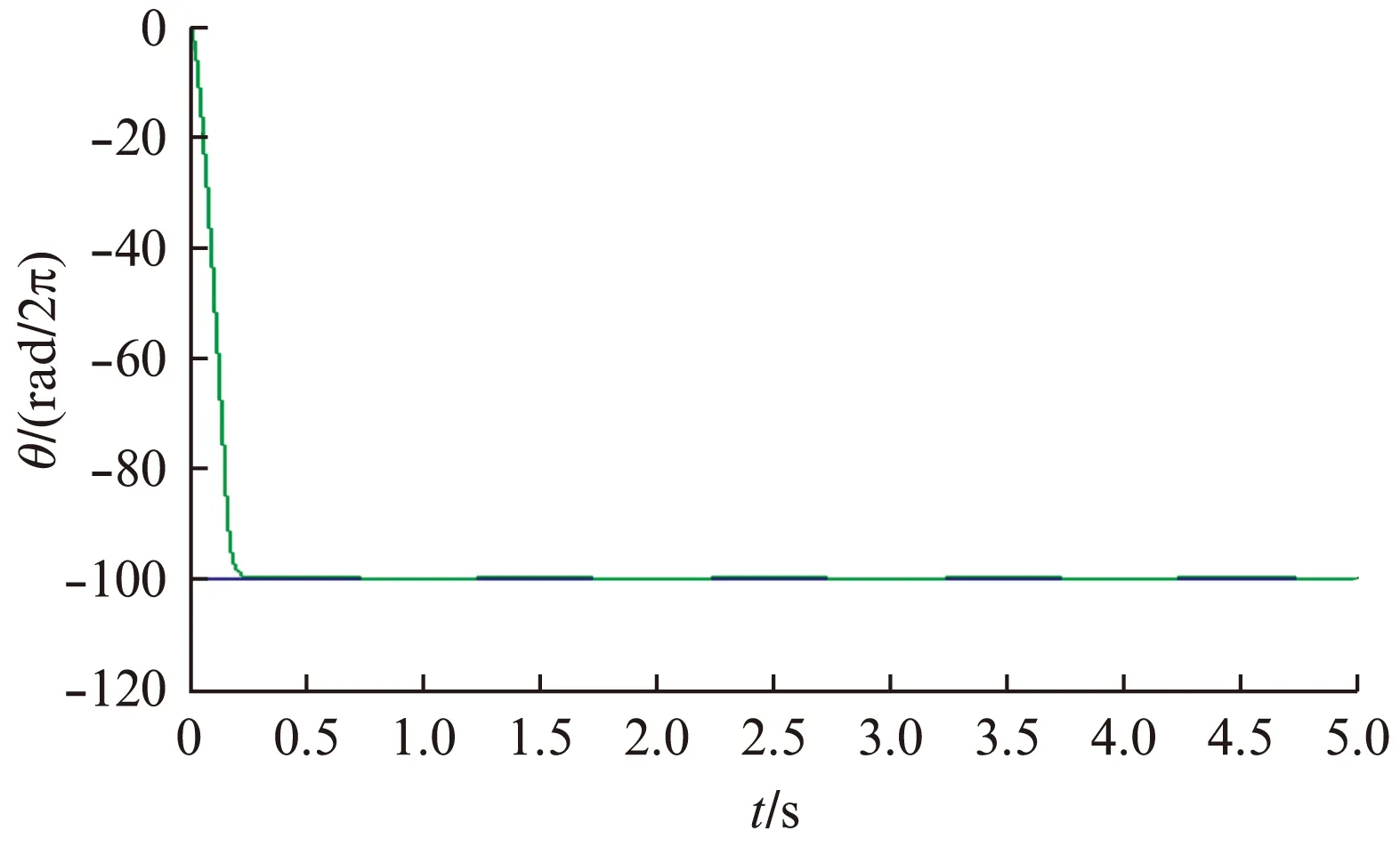
图6 电机转角控制阶跃响应曲线(反转)
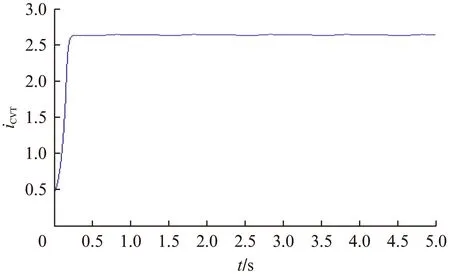
图7 对应EM-CVT速比控制曲线
6 结 语
(1) 从提高当前带式CVT传动效率出发,提出了一种采用单电机实现CVT主、从动带轮动盘轴向移动并最终实现速比变化的全电调节控制方案,并介绍和分析了其工作原理和工作特性。
(2) 对EM-CVT速比执行控制系统分别进行了运动学和动力学分析,得到了速比执行电机转角与EM-CVT速比的对应关系,为速比控制系统建模仿真提供依据。
(3) 针对EM-CVT速比执行控制系统,设计了滑模变结构控制器,并通过建模仿真,验证了该
控制器设计的正确性,为后续EM-CVT与发动机及整车的匹配控制奠定基础。
(4) 通过EM-CVT工作特性分析及建模仿真分析可看出,EM-CVT具有可消除传动带轴向偏移、夹紧力自动可调、执行机构简化、控制简单等优点。
[1]张兰春,贝绍轶,赵景波.带式无级变速器的速比控制装置: 中国,ZL201010538238.1[P]. 2013: 9-20.
[2]张兰春,常思勤.全电调节无级变速器的理论分析与试验验证[J].汽车工程,2009,31(8): 751-755.
[3]张兰春,常思勤.全电调节无级变速器的试验研究[J].汽车技术,2009(5): 46- 48.
[4]王正茂,阎治安,崔新艺,等.电机学[M].西安: 西安交通大学出版社,2000.
[5]PERRUQUETTI W, BARBOT J P. Sliding mode control in engineering[M]. New York: Marcel Dek-ker Inc, 2002.
[6]UTKIN V, GULDNER J, SHI J X.Sliding Mode Control in Electromechanical Systems[J]. London: Taylor & Francis,1999.
Theoretical Analysis and Speed Ratio Control Study of an Electrical Continuously Variable Transmission Pulley Actuation System
ZHANGLanchun1,CHAIHuawei1,HANGWeixing1,LIUJingang2
(1. School of Vehicle and Traffic Engineering, Jiangsu University of Technology, Changzhou 213001, China;2. School of Mechanical Engineering, Xiangtan University, Xiangtan 411105, China)
An electrical continuously variable transmission (CVT) pulley actuation system with one motor was presented to improve the CVT efficiency. The working principle of this actuation system was introduced and the working characteristic was analyzed. The mathematical model between motor rotation and CVT speed ratio was established based on kinematic analysis. The sliding mode controller based on proportion switching was designed on basis of the actuator dynamics analysis, and the simulation was carried out to verify the designed controller could meet the tracking control for CVT speed ratio better.
electrical actuation system; sliding mode control; motor control; continuously variable transmission
国家自然科学基金项目(51305175,51475402);江苏省六大人才高峰资助项目(ZBZZ-039)
TM 301.2
A
1673-6540(2015)04-0006-05
2014-10-16
猜你喜欢
军民两用技术与产品(2021年5期)2021-07-28 05:54:50
制造技术与机床(2019年11期)2019-12-04 05:50:26
太空探索(2017年12期)2017-11-30 13:45:33
汽车工程(2016年11期)2016-04-11 10:57:53
黑龙江工程学院学报(2015年5期)2015-12-04 01:39:45
深圳职业技术学院学报(2015年5期)2015-11-30 06:22:25
电源技术(2015年1期)2015-08-22 11:16:20
太空探索(2015年6期)2015-07-12 12:48:42
汽车工程(2014年7期)2014-10-11 07:42:02
机械制造与自动化(2014年1期)2014-03-01 04:21:45