超声波汽车倒泊防撞系统的设计
2014-08-31 09:48:30赵吉业
山东工业技术 2014年21期
张 红,郭 健,赵吉业
(1.长春工程学院,2.吉林省电力有限公司电力调度中心,长春 130012;3. 国网重庆市电力公司江津供电分公司,重庆 402260)
1 系统整体设计方案
超声波汽车倒泊防撞系统是一个各部分协调运作的控制系统。系统要完成从超声波发送、超声波接收、单片机的记时与距离计算,到执行机构执行的整个过程。系统在不同的距离段内,单片机通过控制PWM的输出,进而实现在不同的距离段内,用不同的车速行驶。要求单片机把距离的计算、相应的显示距离、报警模块的运作以及直流驱动电机的控制精密地结合在一起。
系统划分为不同的模块进行讨论。结构上,超声波汽车倒泊防撞系统包括超声波发送及接收模块、直流电机驱动模块、声光报警模块等。
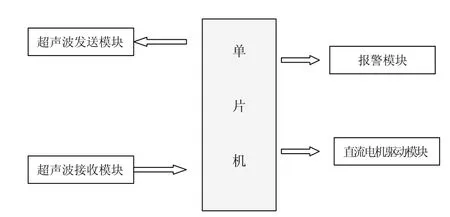
图1 防撞系统整体设计图
2 超声波发射及接收模块
超声波模块应用广泛,其产生方法有硬件产生和软件产生两种方法,其模块分为发生和发射超声波两部分,本模块采用软件产生超声波,主要利用单片机的I/O口的p1.0输出超声波,输出后会产生40KHZ的脉冲波,发射器发出40KHZ的超声波以速度V在空气中传播,在到达被测物体时被反射返回,由接收器接收。
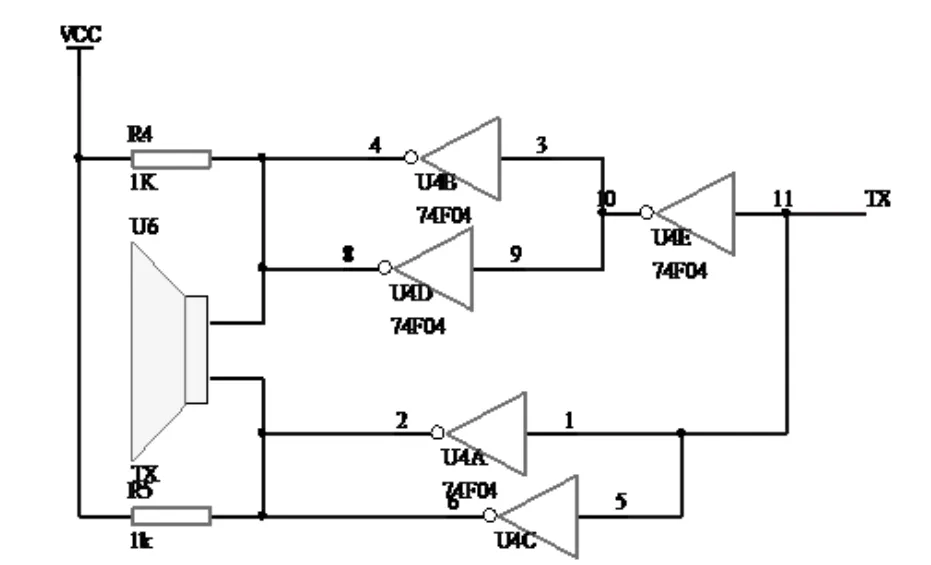
图2 超声波发射电路图
3 直流电动机模块电路
直流电机驱动模块未采用专用的直流电机驱动集成芯片,而采用复合互补对称功率放大电路(达林顿管),完全由分离元件搭建而成。使得更加精简、高效、易控制,而且降低了系统的成本。
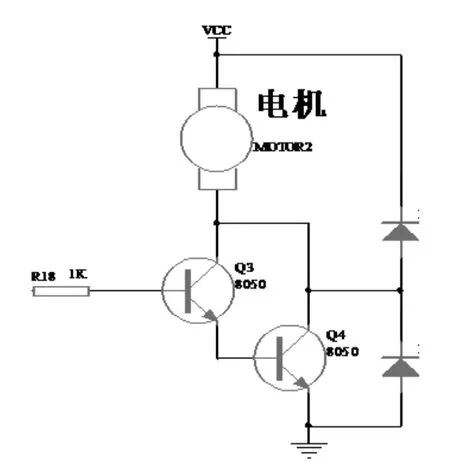
图3 直流电动机模块电路图
4 报警电路
报警电路模块采用简单的声音和灯光报警。在设计中一般设定车离障碍物的距离1米后则产生报警信息,当车尾与障碍物的距离超过安全距离时,则二极管灯灭,蜂鸣器关,如车尾与障碍物的安全距离小于设定距离时,则红二极管灯亮,蜂鸣器响,直流电机停止工作。
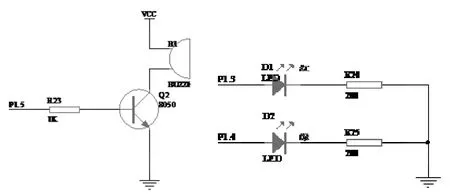
图4 声光报警图
5 结束语
超声波测距应用广泛,本文主要介绍了AT89S52为核心的主要电路,搭建相对简单,实施方便,但在实际搭建中存在蜂鸣器声音过小,报警不明显等问题,需要进一步改善电路。
[1]赵建顺,王玉泰,超声汽车防撞系统的研究[J].济南大学学报(自然科学版),2001(09).
[2]华强,激光-超声-单片机组合汽车防撞系统[J].惠州大学学报(社会科学版),2001(12).
[3]张建丽,张倩,汽车倒车防撞报警器的设计[J].商业文化(下半月),2011(11).
猜你喜欢
大电机技术(2022年5期)2022-11-17 08:12:56
疯狂英语·初中天地(2022年9期)2022-08-29 13:58:36
电脑报(2020年12期)2020-06-30 19:56:42
时代农机(2019年2期)2019-04-24 01:20:14
小哥白尼(趣味科学)(2018年12期)2018-12-18 02:13:58
汽车工程师(2018年1期)2018-07-13 00:47:56
电子制作(2017年1期)2017-05-17 03:54:12
中国公路(2017年13期)2017-02-06 03:16:33
汽车维护与修理(2016年10期)2016-07-10 08:17:41
民用飞机设计与研究(2015年3期)2015-12-07 12:09:31