POS系统在空三加密中的应用与分析
2011-08-06 15:25:44龙海奎曾庆友吴珊
城市勘测 2011年5期
龙海奎,曾庆友,吴珊
(乌鲁木齐市城市勘察测绘院,新疆维吾尔自治区乌鲁木齐 830000)
1 前言
随着数码航空摄影技术在测绘工作中的推广,全球导航卫星系统(GNSS)技术的广泛应用,特别是精密空间定位系统(Positioning Orientation System,POS)技术的研发应用,提高了导航定位精度,数码航空摄影质量也大大提高。POS系统是高精度定位定向系统,集差分全球定位系统(DGPS)技术和惯性导航技术于一体,可以获取运动载体的空间位置和三轴姿态信息,也就是获取瞬时摄影像片的空间位置和三轴姿态信息。系统包括GPS接收机和IMU(惯性测量单元)两个部分,也称GPS/IMU集成系统。
本文结合乌鲁木齐高精度数码航空摄影项目中采用POS技术的实践,对东部区域航摄地面分辨率优于20 cm的数码航摄资料在航测内业工作中的应用进行探讨。
2 POS系统
在开展数码航空摄影时,将POS系统和数码航摄仪集成在一起,通过GPS载波相位差分定位获取数码航摄仪的位置参数及IMU测定的数码航摄仪的姿态参数,经后续IMU、DGPS数据的联合处理,获取航空摄影瞬间像片的位置(3个线元素)和姿态(3个角元素),即像片定向的6个外方位元素,这样在航测内业时能恢复摄影时像片与地面的关系,从而进行像片的解析测量。这些参数的直接获取给数字摄影测量带来了深刻的影响,能够极大减少乃至无需地面控制直接进行航空影像的空间地理定位,为航空影像的进一步应用提供快速、便捷的技术手段,部分数字摄影测量的算法,甚至是整个作业流程都面临新的改进[1]。
3 技术分析
3.1 数码航空摄影
乌鲁木齐市数码航空摄影使用UCX数码航摄仪,采用焦距100.5 mm,像片像素 7.2 um,幅面6.8 cm×10.4 cm(解压缩后数据量 400 M左右),开展了3400 km2不同区域、地面分辨率分别优于 20 cm、15 cm、10 cm的航空摄影,地面基准站采用乌鲁木齐连续运行卫星定位综合服务系统(URCORS)参考站的数据进行摄影的联合数据处理,保证数码航空摄影数据成果的准确、可靠。
3.2 坐标转换
通过POS系统联合平差计算的摄影瞬间像主点的坐标是由GPS卫星定位系统采集数据验算而来,其数据是采用国家大地坐标系(CGCS2000坐标系)的成果。目前无论在航测外业还是内业测图,所采用的坐标系主要是1954年北京坐标系、1980西安坐标系或地方独立坐标系统,与摄影瞬间像点的坐标是不一样的,为了使用摄影瞬间像片的位置(3个线元素)和姿态(3个角元素),必须进行坐标转换,在统一的坐标系内进行航测内业运算和测图。
根据航测生产的目的,测绘成果服务城市规划建设使用,需要将国家大地坐标系(CGCS2000坐标系)的摄站像主点坐标转换成乌鲁木齐市地方坐标系下的成果,依据URCORS系统的坐标转换模型,将摄站像主点坐标统一转换到乌鲁木齐地方坐标系下,坐标三维数学精度满足生产需要[4]。
4 航测作业
4.1 外业像控点联测
航测成图采用地面分辨率优于20 cm的数码航摄资料,为提高工效,减轻外业作业强度,外业控制点布点采用区域网法,考虑常规作业,航线按每隔4条基线布设一对平高控制点。测区如图1所示,3条航线。每条航线20个像对,共布设4排6列像控点。根据数码航片的特点,结合外业像控点选刺,依据布点方案,喷绘布设像控点对应数码像片的放大片(一般选择A3幅面大小),提供野外作业。
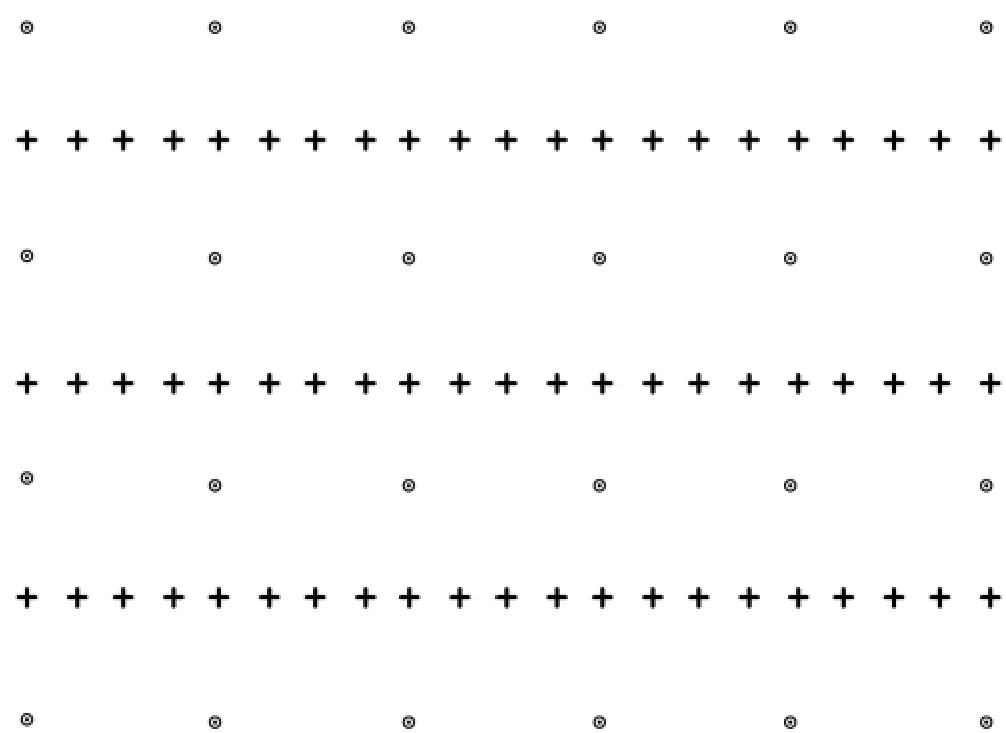
图1 航线及像控点分布图
外业像控点联测采用URCORS技术,配置GNSS/GPS接收机、GPRS模块、SIM卡等设备,首先获得URCORS数据中心授权的用户名、密码、IP地址、端口设置等参数,接入CORS中心,开展网络RTK作业,直接得到像控点在乌鲁木齐地方坐标系下的坐标测量数据。
4.2 解析空三加密
(1)技术分析及作业流程
空三加密是航测内业测图的第一道工序,是测图的数学基础,采用VirtuoZo AAT 3.4和PATB软件空三加密作业,流程如图2所示。应用VirtuoZo 3.7全数字摄影测量系统采集1∶1000比例尺地形图数据。
空三加密软件利用影像处理和多影像匹配技术自动完成像对连接点的点位选择和自动转换点,但由于摄影区域的多样性,造成影像中存在诸如遮挡、纹理缺乏、影像变形等情况,由于是软件自动选取连接点,就会存在点位不好、不清晰和错点等问题,而在空三加密中像片选点和转点是质量控制过程中非常重要的环节,要求在连接点编辑环节必须一对一进行相对定向点位的检查,保证每个像对标准点位有连接点,点位分布均匀,连接点一般不少于30点。
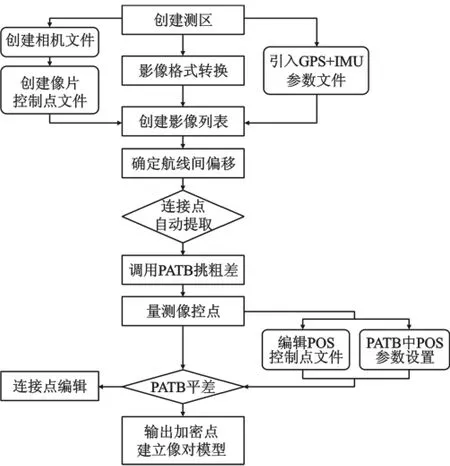
图2 空三加密作业流程(常规和配置POS系统)
(2)作业
根据VirtuoZo AAT 3.4和PATB软件进行空三加密作业,首先按常规方法进行区域网加密,解算加密点成果。然后依据POS系统参数设置,进行加带POS系统的区域网加密,解算加密点成果。考虑POS系统参与解算,空三加密时分两种情况进行作业,一是选择10条基线布设一对像控点的方案进行加密,二是选择20条基线布设一对像控点的方案进行加密,分别解算加密成果,最后进行精度分析。
(3)精度分析
空三加密成果有3个,分别是常规空三加密(不加POS系统,4条基线布设一对像控点的区域法)、加带POS系统的空三加密(10条基线布设一对像控点的区域法)和加带POS系统的空三加密(2条基线布设一对像控点的区域法),在带POS系统空三加密中,通过多次作业,反复验证发现有GPS获取的外方位线元素比惯性导航IMU获取的角元素对空三加密精度的影响值大而且有效。在测区均匀的选取了12个野外检查点与内业加密点进行数值比较和精度分析,精度指标统计如表1所示。
与此同时,利用3个空三加密成果,选择同一区域进行1∶1000比例尺航测内业数字化成图,通过野外散点检测区域内地物和地貌点的数学精度,精度统计如表2所示。
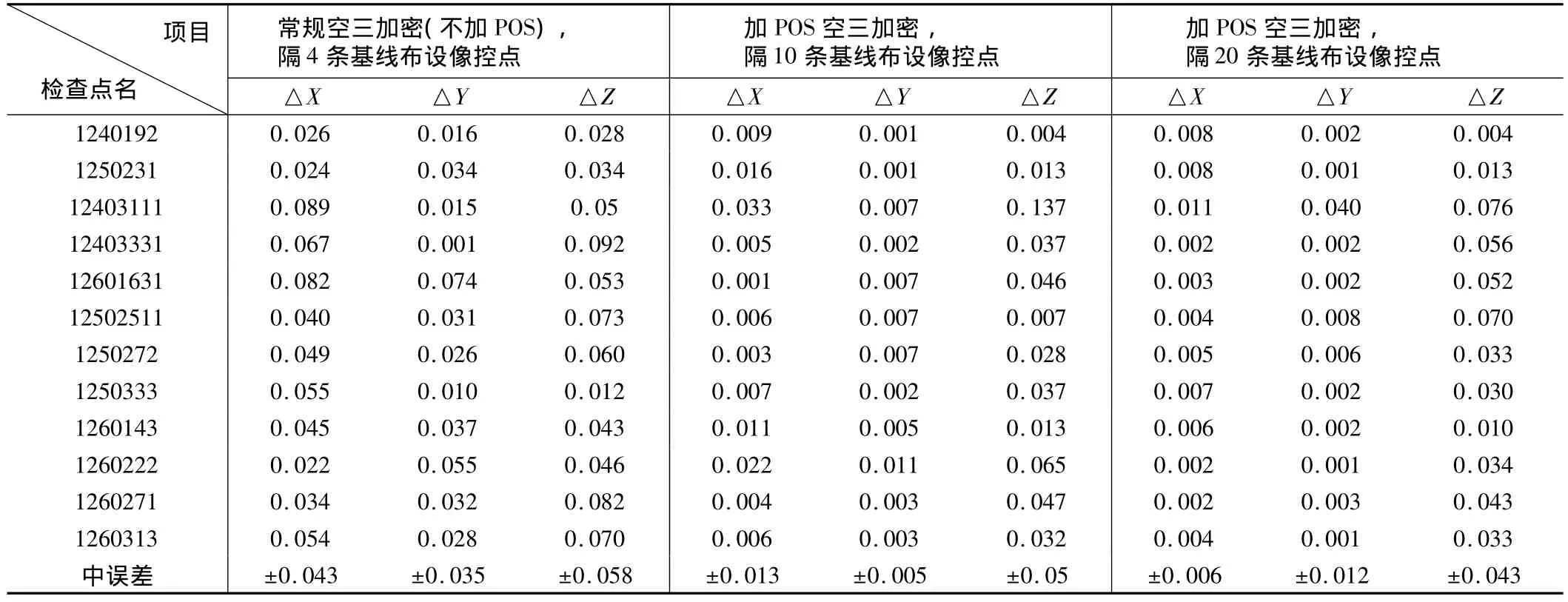
空三加密精度分析统计表(单位/m) 表1

航测图野外检测精度统计表(单位/m) 表2
从表1、表2可以看出,三种加密成果的野外检查点的误差在限差内,常规空三加密成果所成大比例尺地形图的高程检测误差超过限差值,而带POS系统空三加密成果所成大比例尺地形图的平面、高程检测误差均在限差内,数学精度满足规范的技术指标,适合技术生产。从检查点和航测成图的数学精度分析中可以看到带POS系统后,空三加密数学精度有所提高,特别是在高程精度方面效果显著,满足大比例尺航测成图规范要求。
5 结论
通过常规空三加密和带POS系统空三加密在大比例尺航测成图中的实践应用,可以看到,带POS系统后,空三加密精度有所提高,适合城市大比例尺航测成图工作需要。而且在使用POS系统后,减少了的野外像控点的布点数量,布点方案灵活,产品的质量准确、可靠,提高了工作效率和效益。
[1]郭大海,王建超,郑雄伟.机载POS系统直接地理定位技术理论与实践[M].北京:地质出版社,2009
[2]王铁军,郑福海,王俊杰.IMU/DGPS辅助空中三角测量精度分析[J].地理信息世界,2009(8)
[3]陈宇彤,邓权,黄绍美.GPS辅助空中三角测量在大比例尺地形图中的应用[J].测绘与空间地理信息,2010(3)
[4]龙海奎,白锋.乌鲁木齐区域地理框架坐标建设的探讨[J].城市勘测,2009(4)
[5]袁修孝.GPS辅助空中三角测量原理及应用[M].北京:测绘出版社,2001
[6]适普软件有限公司.自动空中三角测量软件使用手册[Z].
猜你喜欢
写真地理(2020年39期)2020-12-23 02:01:59
理论与创新(2020年15期)2020-10-09 11:07:45
辽宁省博物馆馆刊(2020年0期)2020-08-13 09:15:58
航空知识(2019年1期)2019-01-11 01:34:48
现代测绘(2018年3期)2018-09-13 09:34:46
企业科技与发展(2018年5期)2018-09-10 00:20:39
环球飞行(2018年7期)2018-06-27 07:25:52
科学与财富(2017年19期)2017-07-19 10:59:15
长江工程职业技术学院学报(2017年2期)2017-06-19 18:49:05
中国房地产业(2016年9期)2016-03-01 01:26:46