
一例永磁同步电动机的转子位置检测故障分析
2010-09-29 12:17:32梁毅孙继
制造技术与机床 2010年2期
梁毅孙继
(中国工程物理研究院机械制造工艺研究所,四川绵阳 621900)
永磁同步电动机,因其效率高、体积小、调速性能良好得到广泛应用。在伺服系统等高精度控制的场合一般需要安装光电编码器、旋转变压器等位置传感器来获得电动机转子的准确位置。由于安装的误差会使位置传感器的零位产生偏差,位置传感器的零位偏差将造成转子位置检测的零位偏差,而电动机转子检测零位偏差的存在引起逆变器开关管逻辑换向错误,将引起不期望和不可控制的轴电流,严重时会造成电动机无法启动或转动。转子位置零位偏差即位置传感器的零位偏差,它是指位置传感器相对于转子实际位置的偏差。下面分析一例由于编码器的安装误差引起的电动机非正常工作。
1 故障现象
一台配套SIEMENS 802D系统、611Ue伺服驱动的数控铣床,Z轴移动0.62 mm时出现ALM380500报警,611Ue伺服驱动出现E-608#报警。
2 故障查找
ALM380500报警的含义是PROFIBUS DP驱动器连接出错;E-608报警的含义是Z轴驱动器速度调节器输出达到极限。根据机床资料要求检查驱动器与电动机和编码器的连接、电动机接地连接、编码器类型及脉冲数的设定、检查机械负载情况及更换驱动器功率模块或控制模块故障等等。检查机床驱动器与电动机、驱动器与CNC的连接,确认位置反馈极性、位置反馈连接均正确。电动机编码器与电动机的连接也没发现松动。编码器的类型及脉冲数的设定也正确。Z、Y轴共用一个双轴驱动模块,为了判断驱动器是否有故障,把Z、Y轴电动机动力线及反馈线交换,结果Y轴运动正常、Z轴还是不能移动,因此排除驱动器本身故障。天车吊起主轴配重,配重链能自由地上下移动,因此也不怀疑除电动机外的机械故障。根据经验判断,此类故障刹车不能完全松开也可能使电动机负载增大,因此没有把电动机和机械脱开进行电动机空转试验,就直接把电动机从机床上拆卸下来进行电动机刹车的检查。而检查电动机刹车必须拆卸编码器,电工拆卸该编码器的时候没有做编码器轴与电动机轴的安装零位标记就直接把编码器拆卸下来。调整电动机刹车间隙使其刹车效果良好后试机,驱动器“使能”后Z轴出现飞车。出现此现象的原因可能是编码器安装的零位偏差造成电动机转子位置检测的零位偏差引起不期望和不可控制的轴电流,造成电动机无法正常转动。因此为了纠正较大的零位偏差,交换电动机动力线V、W两相,驱动器“使能”后不出现飞车,但伺服电动机只转动约20°后驱动器就出现E-608报警。把电动机与机械脱开,驱动器“使能”后电动机仍旧转20°后出现E-608报警。利用Simo ComU软件联机观察611Ue驱动器上伺服电动机工作电流,发现电动机慢慢转动时,电动机电流不断增大,最后突然增大超过电动机最大电流P1108设定的27 A,把最大电流增大时观察电动机工作电流仍然超过电动机最大电流设定值。用新的电动机更换后观察也出现同样的故障。由于驱动器是好的,新的电动机也不应该有问题,问题出在哪儿呢?分析并回忆维修过程发现有可能是驱动器与电动机间的相序不对造成。把电动机动力线还原,使其与驱动器的相序一一对应,试机电动机工作正常。再利用Simo ComU软件联机观察611Ue驱动器上伺服电动机工作电流,实际电流只有1 A左右,因此相序错误造成新电动机非正常工作。把新电动机与Z轴丝杠连接,Z轴移动0.62 mm后驱动器又出现E-608报警。再次让电动机脱开机械,Z轴工作正常,因此机械有故障。钳工经过分析检查发现主轴配重的拖链轴承因滚珠研碎卡死不转。更换该轴承后,故障全部排除。下面分析编码器安装的零位偏差造成的电动机非正常工作的原因。
3 故障原因分析
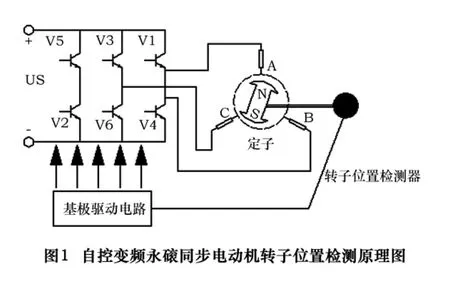
该电动机型号为1FT6105-8AB71-3AH1,是自控变频永磁同步电动机,其转子位置传感器为2048线正弦型增量编码器ERN1378。由永磁同步电动机的工作原理可知,定子电枢反应磁场轴线必须时刻跟随转子旋转并保持与转子的磁极轴线垂直,只有在这样的条件下,电动机轴才能输出与电流成正比的电磁转矩。事实上,驱动控制器一边每时每刻从电动机轴上获取转子位置信号,用该转子位置信号控制着逆变器功率开关元件的触发顺序,一边从直流母线上逆变出三相交流电压,使电动机中的三相电流产生的电枢反应磁场轴线与转子磁场轴线正交且同步旋转,因此转子位置传感器是使永磁交流伺服电动机正常工作不可缺少的元件。只有合理的控制逆变器的触发顺序,才能使相电流和激磁电势的相位保持同步。自控变频永磁同步电动机转子位置检测原理如图1。
电工调整电动机的刹车后编码器的电气零位与转子的零位发生变化,使逆变器的功率元件触发顺序错乱,电动机中的三相电流产生的电枢反应磁场轴线与转子磁场轴线不能正交并保持同步旋转,因此不能使电动机正常工作,出现电动机的飞车现象。为了避免电动机出现飞车,把电动机动力线交换V、W两相后不出现飞车。虽然不出现飞车但电动机只能转20°左右,驱动器便出现报警。其原因是驱动器输出的三相动力线与电动机动力线的连接不是一一对应的相序造成。UVW三相动力线与驱动器的UVW三相接线端子之间的可能连接关系共有六种,以驱动器接线端的UVW顺序为正确接入相序,则电动机动力线接入驱动器端子后,包括一一对应的“正常接入相序”电动机UVW对驱动器UVW在内,根据排列组合,共有6种可能的接入顺序,分别为电动机的UVW,UWV,VWU,VUW,WUV,WVU动力线对驱动器的UVW端子,因此驱动器的U、V、W端子有可能分别被接入了电动机的U或V或W相动力线。由于电动机的动力线上的反电势相位代表了电动机的实际电角度,而驱动器的UVW端子的输出电压电流波形间的相位取决于电动机编码器相位所表示的确定相序的电角度。因而,在电动机动力线的UVW相与驱动器的UVW端子之间的对应关系不同时,就会出现驱动电压电流波形相位与电动机反电势相位之间的偏差。如果U-V-W正常接入相序,电角度偏移量为0,电角度增量为+Δθ,后续电角度可表示为+Δθ。此时伺服控制始终处于完全正交解耦的最佳状态,伺服系统正常工作。如果不是U-V-W相序接入,则电动机电角度偏移量不为0,电动机电角度增量方向可能与驱动的逆转方向一致,从而导致电动机进入正反馈区或者使电动机稍动后锁死。电动机的驱动电流都会很快达到最大,直至出现过流或过载故障,引起停机。旧的电动机的刹车被调整后出现了飞车,这就是由于编码器安装的零位偏差引起电动机进入正反馈区,而调换电动机相序后,则电动机稍动后因过流锁死。因此只有一一对应的“正常接入相序”电动机UVW对驱动器UVW,且编码器检测转子无零位偏差,电动机才能正常工作。
后来还原电动机相序并经过多次调整编码器的安装角度后,电动机空载时可以自由旋转,但带机械负载还是不能正常工作。原因是没有实验条件调整编码器,使其与转子零位偏差为零,因此只有使用新电动机。
4 结语
由上述维修过程可知伺服驱动器报同样E-608报警,前后的故障原因是不同的,开始是主轴配重拖链轴承损坏引起的机械负载过大引起;而电动机刹车被调整后驱动器出现E-608报警是由于编码器与电动机转子的固定电气零位发生改变和电动机相序的改变所致。因此自控变频同步电动机维修要注意以下几点:①驱动器和电动机动力线间的一一对应的UVW相序不能改变。②电动机和机械脱开时一定要做电动机的空载实验确认电动机刹车是否真的没松开,以避免盲目拆卸电动机而使故障扩大。③在确认拆卸编码器时一定要做好安装标记,以免编码器与转子的电气零位发生变化导致电动机的非正常工作。
猜你喜欢
现代机械(2021年3期)2021-07-12 00:47:42
电脑爱好者(2020年6期)2020-05-26 09:27:33
客车技术与研究(2019年5期)2019-10-24 02:22:44
光学精密工程(2016年5期)2016-11-07 09:06:04
科普童话·百科探秘(2015年6期)2015-10-13 07:05:15
伴侣(2015年5期)2015-09-10 07:22:44
大众科学(2015年10期)2015-09-10 07:22:44
上海电机学院学报(2015年3期)2015-02-28 14:29:52
电子设计工程(2015年3期)2015-02-27 12:03:53
决策与信息(2014年21期)2014-12-13 01:50:10
